前を読みたいという場合はこちらへ
![]()
前を読みたいという場合はこちらへ
(その後:FG周波数をStudyしてみる)
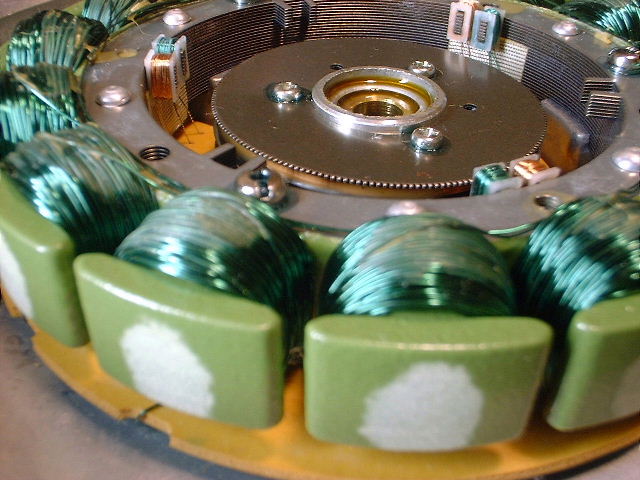
突然だが、これ↓がSP-10MK2のモーターのステーター(左)とローター(右)。ローターは裏返して天井を向いた状態になっている。
ステーターの軸を囲んで真ん中にあるものがFG(周波数発電機)。歯車とその下にコイルらしきものが見える。この写真では見えないが実は同型の歯車がもう一枚底の方にあって、2枚の歯車にコイルが挟まれた構造になっている。
そして右のローターの軸を取り囲む円筒形の磁石か磁性体らしきものもFGの一部だ。動作時にはその内側がステーター側の歯車を取り囲んで回ることになるのだが、その内側に掘ってある縦のギザギサが実にキモな部分である。
動作時、ローターが回転すると、対向する歯車とギザギサの間で磁束のやりとりが行われこれがコイルを貫通する訳だが、歯車とギザギザという構造物のため、コイルを貫く磁束の大きさと方向が変化し、コイルには電磁誘導によって回転速度に比例する周波数と大きさの起電力が生じるわけだ。
速度制御と位相制御に利用するのは、そのうちの回転速度に比例する周波数の方なのだが、そうなると歯車の数とギザギザの数が重要になる。何故ならこの数が周波数を決めることとなるから。
だから、歯車の数を正確に把握する必要がある。ので現物を実際に数えれば良いのだが、細かすぎて正確に数えられない。大体190個ではないかなぁ、とは思うのだが・・・(^^;
 |
 |
残念ながら、この数についてのデータがない。
よって、傍証から推測するわけだが、SP-10MK2のサービスマニュアルにはこれを推測させるものとして、クロック周期が33rpmで9.5mS、45rpmで7mS、78rpmで4mSというものがあるらしい。したがってこれが正確だとすればクロック周波数は33rpmで1/9.5mS=105.263Hz、45rpmで1/7mS=142.857Hz、78rpmで1/4mS=250Hzということになるのだが、これから逆算すると歯車の数は105.263*60/331/3=189.4736842≒189個、142.847*60/45=190.47619≒190個、250*60/78=192.30769≒192個となって、う~ん、190個付近のようには思えるのだが、190個という確証にはならない。
この点、K先生はいにしえからSP-10MK2のFG周波数を105.5Hz(331/3rpm)と142.4Hz(45rpm)とされている。こちらから逆算すると歯車の数は105.5*60/331/3=189.9≒190個、142.4*60/45=189.86666≒190個であるので、やはり190個がくさい。
そこで歯車を数を189本、190本、191本と仮定してその場合のFG周波数を理論計算してみると、
189本の場合:189*331/3/60=104.999・・・Hz と 189*45/60=141.75Hz
190本の場合:190*331/3/60=105.555・・・Hz と 190*45/60=142.5Hz
191本の場合:191*331/3/60=106.111・・・Hz と 191*45/60=143.25Hz
なので、以上の事を考えあわせるとやはり190本が正解。と思うのである。であれば、SP-10MK2のFG周波数は、正確には331/3rpmで105.555・・・Hz、45rpmで142.5Hzでなければならない。
となると、次の疑問は先生が何故MK2のFG周波数を105.5Hzと142.4Hzとされているのか? なのだが、これは分かる筈もない。
もしや、先生ちょっと間違ったのか?(^^; どうかはどうでも良いのだが、この際、FG周波数は正しくは105.555・・・Hzと142.5Hzなのだ、ということを前提にしてモーター制御アンプの設定を変更してみよう。という気になったのだった。
となると、分周の意味やそのためのIC、CD4059Aの設定の仕方を理解しなければならない。
まずは分周だが、これは基準周波数を割り算して必要な周波数を得ることであるらしい。1MHzを基準周波数として1kHzの周波数を得たい場合は1MHzを1/1000分周して1kHzを得る。と言うらしく、そしてこの場合の分周比を1000と言うらしい。
この割り算動作を行うCD4059Aの実際の動作は、入力に与えられる基準周波数のパルスを順にカウントして、分周比が1000であればカウンターが1000になった時点で1個のパルスを出力するという動作を繰り返すということのようだ。これで基準周波数と同じ精度で基準周波数の1/1000の周波数が出力される訳だ。が、容易に想定されるように出力されるのは非常に幅の狭いパルスになる訳だ。
同様、容易に想定されるように基準周波数が高く、分周比が大きい方が多くの分周後の周波数を細かく設定できることになる。例えば今回の105.555・・・Hzや142.5Hzなどという中途半端な周波数を作るためには1MHzの基準周波数ではなくもっと高い周波数の方が計算上は良いのだが、まぁ、それは求める精度や設定可能な分周比の範囲などの問題だろう。
で、1MHzの基準周波数で分周比をどうするかだが、これは割り算するだけであるから、105.5Hzと142.4Hzとされている先生の場合、
331/3rpm:1000000/105.5=9478.672986で 9479
45rpm:1000000/142.4=7022.471910で 7022
したがって分周比を9479と7022に設定されている訳だ。
CD4059Aには分周比を整数で入力する必要があるために少数点以下を四捨五入で丸めている訳だが、このために分周後の周波数は、
331/3rpm:1000000/9479=105.4964Hz
45rpm:1000000/7022=142.4096Hz
と、やや誤差が生じてしまう。のだがこれはやむを得ないし、無視すべき程度のものだろう。
今回はFG周波数に105.555・・・Hzと142.5Hzを採用するのだから、分周比は
331/3rpm:1000000/105.555・・・=9473.684211で 9474
45rpm:1000000/142.5=7017.543860で 7018
を採用することになる。この場合も小数点以下丸めのため実際の分周後の周波数は
331/3rpm:1000000/9474=105.5520Hz
45rpm:1000000/7018=142.4907Hz
になる。
次に、CD4059Aの設定なのだが、CD4059Aで設定できる分周比は2~15999の任意の整数だ。
そしてその分周比はモード(Ka、Kb、Kc)とジャムインプット(J1~J16)で設定する。
具体的には必要な分周比を、モードで設定した数字で割って、得られた商と余りをJ1~J16に入力すれば良い。
モードの設定は、
Ka|Kb|Kc|
1 |1 |1|=2
0 |1 |1|=4
1 |0 |1|=5
0 |0 |1|=8
1 |1 |0|=10
なお、この場合1とは具体的には+5V、0とは-5Vの電圧を与えるということで、ジャムインプットの場合も同じだ。
次に分周比をモードで割った商と余りをJ1~J16に入力する訳だが、ポイントはJ1~J4までの使い方。デジタルなので数字は全て二進法なので、モード設定に伴う余り数を表現するために必要なビット数に応じてJ1~J4の4ビットを上手く使うようになっている。
モード2の場合:余りは0か1なので二進数1ビットで表せる。だからこの場合は余りを入れるジャムはJ1の1ビットのみの設定になり、J2からJ4の3ビットを、10進数で表した商の千の桁の数を二進数で入力するジャムとして使う設定となる。
この場合、商の方の桁は3桁(3ビット)なので二進数で表せる最大数は7。したがって商の最大は7999。よって分周比最大は7999×2+1=15999となる訳だ。
モード4の場合:余りは0から3なので二進数で表すためには2ビット必要なので、この場合はJ1とJ2が余りを入れるジャムに設定され、J3とJ4の2ビットに10進数で表した商の千の桁の数を二進数で入力する設定となる。
この場合商の方の桁は2桁(2ビット)なので二進数で表せる最大数は3。したがって商の最大は3999。よって分周比最大は3999×4+3=15999となる。上手く考えられいる。(^^)
モード5と8の場合:余りが0から7(モード5の場合は0から4)なので、この場合は余り用にJ1~J3の3ビットを使い、商の千の桁の数を二進数で入力するジャムはJ4の1ビットのみの設定になる。
この場合商の方の桁は1桁(1ビット)なので二進数で表せる最大数は1。したがって商の最大は1999。よって分周比最大は1999×8+7=15999。(モード5の場合は1999×5+4=9999)
モード10の場合:余りが0から9なので、この場合は余り用にJ1~J4の4ビットを使い、商の千の桁の数を2進数で入力するジャムはなくなり、この場合、商の方はJ5~J16のみによって10進数3桁で表す設定になる。したがって商の最大は999。よって分周比最大は999×10+9=9999。
次にJ5からJ16だが、これはJ5~J8が商の10進数一の桁用、J9~J12が商の10進数十の桁用、J13~J16が商の10進数百の桁用だ。これらをそれぞれ二進数に直して4ビットずつ使用して入力する。
ジャムへの二進数での入力はジャムのそれぞれのグループごとに、ジャムの数字の小さい方から大きい方へ二進数表記の1桁目2桁目3桁目4桁目と入力する。
こうしてみるとモード2とモード4とモード8であれば、どの場合も分周比は2から15999まで設定できる訳だ。モード5と10では2から9999だ。
このうちどれを使うかは、先生が2004年10月号で仰っておられるように、各モード毎に分周プログラム表を作ってどれが最も配線しやすいかで選べばよい。ということになる。
さて、すでに製作済みの我がNo-124モーター制御アンプのCD4059Aの分周比設定を現実に変更できるかのか?が問題なのだが、その可能性を探るためにはやはり分周プログラム表を作って検討する必要がある。
ので、作ってみたのがこれ。
オリジナルのモードは2である。既に配線済みだからこれまで動かしてしまうと大変だ。なので、モードは2のままでジャムインプットはどうなるのかを対比してみる。
ジャムインプットの上の2段がオリジナル設定で、下2段が今回の変更後の設定。分かりやすく色分けしたのは、赤は+5V、青は-5Vで固定、黄色と緑がスイッチでの切り替えを要する部分だ。
ふ~む。これで今回の改造には5カ所のジャムインプットの設定変更が必要であることが分かる。
モード:2
Ka Kb Kc 1 1 1
ジャムインプット
J1 J2 J3 J4 J5 J6 J7 J8 J9 J10 J11 J12 J13 J14 J15 J16 設定数 ×モード +余り =分周比 33 1
0
0
1
1
0
0
1
1
1
0
0
1
1
1
0
4739 2 1 9479 45 0
1
1
0
1
0
0
0
1
0
0
0
1
0
1
0
3511 2 0 7022 33 0
0
0
1
1
1
1
0
1
1
0
0
1
1
1
0
4737 2 0 9474 45 0
1
1
0
1
0
0
1
0
0
0
0
1
0
1
0
3509 2 0 7018 変更 ○ ○ ○ ○ ○
あとは、ケースに収まっている制御基板裏のCD4059A周りがはんだ鏝などが当てられる物理的状況にあるかどうか? なのだが・・・
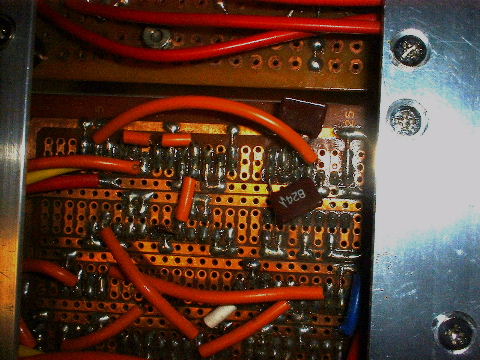
その可能性を探ってみるために、モーター制御アンプが収まっているケースの裏蓋を外してみた。のが写真左。
いやはや、こんなこともあろうかと思って基板を裏蓋に直に取り付けず、桟をわたしてその桟に全ての基板を取り付けた構造が生きた。しかもCD4059Aの取り付け箇所の裏側がちょうど桟の真ん中にあり、どうぞアクセスして下さいと言っているような状況ではないか。
これなら改造のための作業は造作もないわい。(^^)
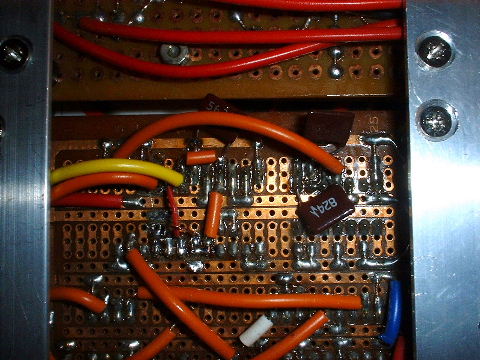
というわけで早速改造作業に着手したところ、作業は小一時間で終了し、その結果、写真右のようになったのだった。
真ん中、上の方に56kΩの進が新たに取り付けられている。これはオリジナルでは表側に-5VからJ1に接続されているものだが、今回J1の接続箇所が-5V固定に変わったので、裏側で-5VからJ14に接続代えしたもの。これを忘れると45rpmがまともに回らなくなるので要注意。
 |
 |
と、改造作業は滞りなく無事済んだので、今回はついでにこれまで付けていなかったClockとFGのチェック用の端子そしてアース端子をスケルトン抵抗の切れ端リード線を釣り針型に加工して基板に立ててみた。もちろん、オシロのプローブの針を引っかけるため。なお、いつかずっと上の方で書いたFG信号に乗るノイズ吸収用にFGプラスマイナス間に取り付けた4700pFなのだが、実はつい最近MC専用ストレートプリアンプのリニューアルのために持っていかれてしまった。ので、今は代わりにSE6500pFがその役に就いている。
さて、改造してしまったことだし、2004年4月号のNo-179に先生が記載されているオシロを使った方法で速度調整、位相調整をやり直してみよう。
今はこの調整用のトリマーがTM7Pとなったので、コパルのN-13Tや我がNo-124制御アンプで使っているコスモスの12Pのように抵抗値の概略が目で把握できない。我がコスモス12Pの場合は他の大抵の1回転型トリマーと同様に1回転がちょうど12分割され、抵抗値最小が大体7時、最大が17時の位置にあり、その間の目盛りが時計と同じように1時間刻みとなっているので、かつてのK先生の制御アンプでの位相調整におけるトリマー位置の表現がぴったりと当てはまる作りになっている。この点では3回転型のTM7Pはちょっと不便。
2現象オシロの時間軸(横軸)を2mS/div、電圧軸(縦軸)を5V/divに設定し、チャンネル1にクロックパルス、チャンネル2にFGパルスを入れ、トリガーソースをチャンネル1(クロックパルス側)、縦軸モードをチョッパーモードにして調整の準備は整った。
最初、速度調整のみ行い、位相調整VRを左いっぱい(7時)にしておくと、クロックパルス(パルス幅が非常に狭いので点としてしか見えない)はピタッと静止するのだが、FGパルス(こちらはパルス幅が比較にならないほど広いごく普通の方形波)は流れている。いや、速度調整をちゃんとやるとFGパルスも流れなくなるのだが、その場合でもクロックパルスとの間には位相差があるし、長期的にはやはり微妙に前方あるいは後方に流れる。
この状態で位相制御VRをゆっくり右に回すと、ある地点でFGパルスがすっと吸い込まれるようにクロックパルスに同期して全く流れなくなる。位相ロックがかかった瞬間だ。その時点の我がコスモス12Pの位置は8時。これは331/3rpmの場合も45rpmの場合も同じだ。
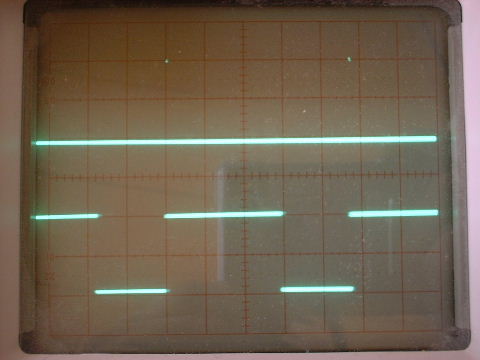
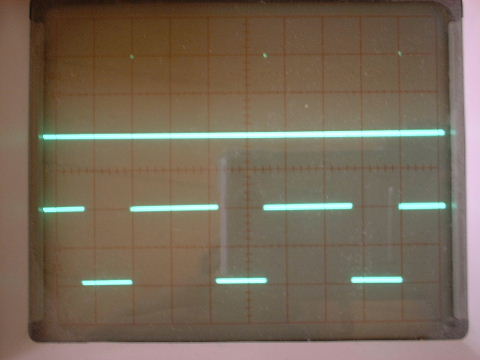
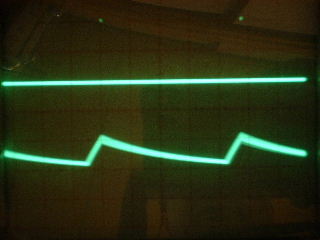
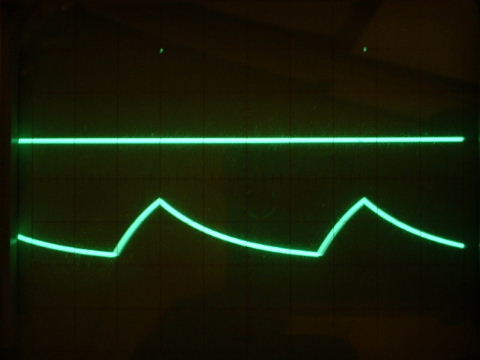
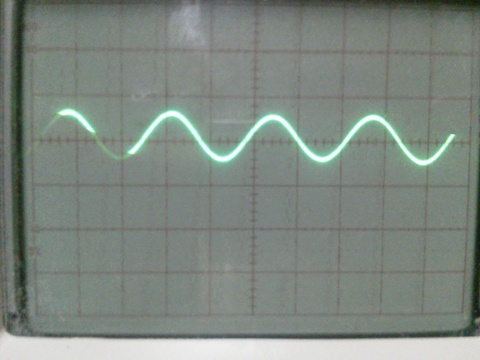
で、これ↓が位相ロックが掛かってクロックパルスとFGパルスが同期した時点のオシロ写真。左が331/3rpmで右が45rpm。
右左とも上がクロックパルスで下がFGパルスだ。クロックパルスの方はもともと1MHzの方形波の1波(パルス幅1uS)であるから、MC14528Bでその幅をやや広めた後も、それがmSオーダーのFGパルスに比較すれば非常に幅が狭い。このため、オシロの時間軸を2mS/divにして観測した場合クロックパルスはパルスの頂点が点としてこのように現れる姿となる訳だ。電圧軸からどちらもその振幅は±5Vであり、時間軸からクロックパルスの周期を読むと331/3rpmの方は9.5mS、45rpmの方は7mSと読める。のでクロックは多分正確。(^^)
ついでながら、先生におかれてもたまにはこのような写真を掲載して頂けると有り難いのだがなぁ・・・(^^;
 |
 |
プラッター外周に手を添えて回転を阻害するように力を加えると、クロックパルスは動かないが、FGパルスの方が右方向に多少ずれる。勿論外力が大きくなれば最終的には位相ロックが外れてしまうのだが、それまでは位相ロックは外れずに位相が遅れるだけで踏ん張る。外力が大きいほどにずれ幅(位相差)は大きくなるのだが、すぐさまフェイズコンパレターからずれ幅に比例した加速信号が位相制御側のLF398Hに出され、その結果強力な位相制御信号がモーターに発せられて遅れた位相を元に戻すように制御されるという訳だ。外から加える力が大きいほどにモータ側も大きい力でこれに対抗する。といった表現がぴったりだろうか。位相制御とは多分そういう性質の制御なのだ。
さて、この位相調整VRをさらに右に回していくとどうなるのか。位相制御が強まり、音に抑圧感が生じ、回しすぎると一種の発振状態になって回転が不安定になってしまう、と言うのが先生的表現だが、もっと即物的に言うと、位相制御を強くするほどに要するに外乱に強くなるのである。外乱があっても位相制御が強いほどにFGパルスはクロックパルスに遅れずに付いていく。その結果プラッター外周に手を当ててその回転を阻害しようとしてもびくともしなくなるのだ。そのびくともしない度合いが位相制御量の増加に比例する。位相制御が弱いと弱い外乱でもクロックパルスに対するFGパルスの遅れが大きくなって、ついには限界を超えたところで位相ロックが外れてしまうのだが、制御が強いほどにその限界が高くなるということなのだ。が、位相制御も強ければ良いというものではないらしくその強さの限界を超えると発振状態になって回転が不安定になるというのはそのとおりであり、我がNo-124制御アンプでは12時を超えると明らかにそういう状態になって、モーターからも異音が聞こえてくるようになる。
そして設定の推奨点は、VRを左に絞りきった状態から右に回して、この位相ロックが掛かった瞬間、我がNo-124制御アンプの12Pで言えば8時のポイント、すなわち、最小限の位相制御が掛かった付近のようだ。が、わたくし的にはこの辺8時から11時ぐらいでは、どの点が音的に最良なのか良く分からない。(^^; し、オシロでこの最良ポイントが明らかになるわけでもない。ので、8時のポイントにしている。要するに位相制御は最小限ということだ。
ついでだが、この位相調整、オシロがないと目で確認して調整ができないのか? というとそんなことはない。インバーターではない蛍光灯と右のようなストロボスコープ(audio-technica AT6180 現行品)を用意すれば、位相ロックが掛かった瞬間は目で簡単に確認することが可能だ。
すなわち、プラッター上にこのストロボスコープを載せて蛍光灯で照らしておくわけだが、速度調整後、位相調整VRを左いっぱいからゆっくり右に回すと、ある地点でストロボの縞が回転方向(速度がやや遅かった場合)かあるいはその逆方向(速度がやや早かった場合)にすっと動いてピタッと止まる瞬間がある。それが位相ロックが掛かった瞬間だ。これはオシロでFG信号がクロックにロックするのを確認するのと同程度に目で簡単に確認できる。
この場合、速度制御を厳密にやり、もとよりストロボの縞はピタッと止まっているのでよく分からないという場合があると思われる。が、その場合は位相ロックのポイントを探すために、速度調整でわざとストロボがやや流れるように調整をしておくという手がある。そんな状態にあっても位相ロックが掛かるとその瞬間ストロボの縞はすっと動いてピタッと止まるので、そのポイントを記録しておいて、速度調整、位相調整を再度やり直せば良いだけ。
もしこれでストロボの縞がピタッと止まらないという場合、それは位相制御回路が正しく作れていない証である。だから、CD4095Aの分周比設定配線などを見直すことが必要になる。のだが、我が改造後のNo-124制御アンプにドライブされるSP-10MK2においては、これがピタッと静止するのであった。めでたし、めでたし。
さて、今回の改造の成果はどうか?
う~ん。やはり回転周波数がより正しくなって、音も一層自然になったような気がする。(^^)
というのは、文字通り気のせいに違いない。(爆)
なにせ今回の改造に伴う回転速度の違いは0.05%程度。したがって、前の状態で1000Hzだったものが1000.5Hzになるといった程度のものなのだ。絶対音感があるわけでもない我が身には、この違いなどとうてい感知できるはずがない。のであった・・・。(^^;
(2006年1月1日)
(その後の2:積分回路の謎を考える)
今年の正月は寒い。
ので、あまり出歩く気にもならない徒然に、ちょっとDCなtetsuさんのHPを覗いてみることにしたのだった。最近ターンテーブル制御アンプのことがアップされていたような気が・・・と思い出したのだ。
ああ、これこれ。“積分回路の謎”。
・・・・・・・・・・・・・・・
ふ~む・・・
アップ直後にも読ませて頂いていたのだが、ろくに勉強をしていないのでその意味するところ良く理解せず、ただ見ただけの状況だったのだが、こうして改めて読ませて頂くと、ちっとは勉強の成果があったのか今回はその含蓄深い文章に込められた意味がビビーンと響いて来るのであった。(^^;
な~るほど、これは私も“積分回路の謎”を考えてみなければなるまいて。
と言うのは、tetsuさん仰るとおり、SP-10MK2用制御回路の積分定数については、時空を超えた旧単行本、音楽を愛する新単行本とも、速度側56kΩ×0.1uF、位相側27kΩ×0.1uFという設定になっているのに、何故か92年のNo-124、すなわち私が製作した制御アンプについては、その設定が速度側も位相側も51kΩ×0.22uFなのである。新単行本下巻は勿論持っているのだが、この点今日まで気づかなかった。(^^;
気づいてみればこの違い。何故だろう。ということになる。で、筋を違えないように気を付けながら、ない頭をあれこれひねってみるわけだが・・・。もし、これがtetsuさんの観測どおりNo-124の定数が「いつもの」ミスプリだとしたら、そのとおりに作った我がNo-124制御アンプは・・・。トホホホホ・・・だよなぁ。
で、取りあえず先生の過去のモーター制御アンプの記事を読み返し、その設定を確認してみることにした。
その結果がこれ。
ついでなので、と言うか、積分回路の謎を考えるためにはFG周波数やその周期、FGパルスを生成している555の時定数設定のためのR&Cの値とこれによるFGパルスのいわゆるTHの時間、そして勿論積分回路の積分時定数設定のためのR&Cの値を知る必要があるので、それらも全てまとめてみた。
555の時定数設定のためのRの値は、表右端の通り(値の小さい方が半固定抵抗)なので、555の時定数設定の欄においてはTHの時間を算出するために半固定抵抗の中間値を用いて設定抵抗値とした。
こうしてみると、これまでに発表されたターンテーブル制御アンプにおいては、SP-10について積分時定数設定が2種あり、SP-10MK2については555の時定数設定が2種あり、積分時定数設定は3種もあることが分かる。他の機種は機種毎に同じ設定だ。ってまぁ、この辺は他の機種は1回又は2回の発表であるという理由もあるわけだが。
さて、そのSP-10MK2の3種の積分時定数設定のうち、No-112の51kΩ&0.1uFの組み合わせについては、例の如くの回路図のミスプリのようで、実は51kΩ&0.22uFが正しいものと思われる。のは、同号の記事中に「本システムでは前回と異なり、積分時定数を大きくした方が安定になる。偶然にもこの値はSP10-MK3用制御部と同じ値だ。また積分時定数に対応して、uA555の出力パルス幅を決定する時定数(6,7番ピン)も回路図のように変更した。」とあるからだ。SP10-MK3用のその部分は表のとおり51kΩ&0.22uFであるし、同号の記事中の基板配置図の方にはこのCの値が0.22uFと表示されているし。
したがって、SP-10MK2用の制御部については2種類が発表されていると考えて良いだろう。
すなわち、速度制御用積分時定数設定が56k&0.1uFで、555の時定数設定が30kΩ+5kΩ半固定&0.22uF(33・1/3rpm)と22kΩ+5kΩ半固定&0.22uF(45rpm)と、速度制御用積分時定数設定が51k&0.22uFで、555の時定数設定が24kΩ+2kΩ半固定&0.22uF(33・1/3rpm)と18kΩ+2kΩ半固定&0.22uF(45rpm)のものだ。
で、ここで訂正をば。(^^;
上の方の“制御アンプの動作を観る”で、FGパルスを見て33・1/3rpmの方で「Thの+5Vが5.4mS、Tlの-5Vに4.1mS トータルT=9.5mSの方形波なのだろう。」と、45rpmの方で「Th=4.3mS、Tl=2.7mS、トータルT=7mS。のはず。」などと書いているが、これは理屈も分からずただ旧単行本から数字だけを持ってきたが故の誤りで、正しくは、33・1/3rpmの方は「Thの+5Vが6.05mS、Tlの-5Vに3.45mS トータルT=9.5mSの方形波なのだろう。」と、45rpmの方は「Th=4.6mS、Tl=2.4mS、トータルT=7mS。のはず。」というのが正しかった訳だ。実際、すぐ上にあるFGパルスの写真を見れば、そのThは33・1/3rpm時で6.05mS、45rpm時は4.6mS程度と読めるではないか。(^^; ようやく我が間違いに気付いた訳でして。
と、まぁこれで私の製作したNo-124の回路図には誤りはなく、その積分回路の定数設定は「いつもの」ミスプリではないようだわぃ。
ので、取り敢えず安心。(^^)
なのだが、それを確かめる意味で積分回路により生成されるサンプルホールドDC電圧がどのくらいになるのかを計算してみたのが、上の表の積分時定数設定とサンプルホールド電圧の欄のV of SHに記した電圧。
って、私がない頭をひねって計算したものではなく、PSpice(評価版)に計算してもらったもの。(^^;
例えばこれがNo-124の33・1/3rpmの場合の速度側積分回路。緑の電圧プローブにサンプルホールドされるべき三角波が現れる。
結果はこう。
これが旧単行本の定数設定ではこうなる。
というわけで、シミュレーション結果から得られた三角波のピーク電圧を転記したのが表の値だ。
その結果を見ると、旧単行本の設定では2.63V(33rpm)、2.43V(45rpm)のものが、No-124の設定では2.32V(33rpm)、2.24(45rpm)であるのに対して、No-112のミスプリと思われる設定では3.23V(33rpm)、2.95V(45rpm)になってしまう。
これら各号の制御アンプ(新単行本のものを除く)については、サンプルホールドIC LF398Hの後ろに来る加算アンプのゲイン設定も、ゲインコントロールアンプLM13600Nの入力側のアッテネータの設定も、モータードライブアンプのゲイン設定も共通だ。したがって、それらのトータルゲイン制御の元になるサンプルホールド電圧は、積分回路の時定数設定を変更しても同じであるべきものだ。ここでは半固定抵抗で調整している部分を固定値で計算しているため電圧が必ずしも一致していないが、このことを勘案してもその電圧値が大きく乖離しすぎるのはおかしいと判断すべきだろう。その意味でも、No-124の方は旧単行本のそれとは0.2V(33rpm)と0.19V(45rpm)の違いであるのに対して、No-112のミスプリと思われる設定では0.6V(33rpm)と0.52V(45rpm)の違いが生じており、やはりNo-112の回路図はミスプリであると考えられるのだ。逆に、No-124の積分時定数設定についてはミスプリではなく、正しい設定値であると考えられるのである。
めでたし、めでたし。(^^)
なのだが、実は我がNo-124モーター制御アンプの積分時定数設定を、速度側56kΩ+0.1uF、位相側27kΩ+0.1uFの旧単行本及び新単行本の定数設定に変えてみたくなってしまったのだった。(^^;
何故か?
それは、tetsuさん仰るとおり、「もとはパルスの幅として生み出される制御信号を電圧に変換するために必要な部分だが、ここの時定数が大きいほど制御の反応が鈍くなり、小さいほど速くなる」からである。
すなわち、まず速度制御について考えると、速度制御部でモーターの回転速度がFG波形の立ち上がり時間毎に検出されるのであるが、その結果がドライブアンプの入力に反映されるまでには、555の時定数設定で規定されるTHの時間を要するのである。例えば何らかの外力によりモーター回転がやや遅くなりつつある場合を考えると、まずFG周波数が当然低くなって、周期TがT’に伸びてしまう。まぁ、これはしょうがない。のだが、そのような状態にあっては一刻も早く加速信号をモーターに与えるべきであるから、次の制御信号を出すまでの時間=T’+THは短い方が良いに違いないのだ。だから、可能ならばTHはできるだけ短い方が良いのである。そこでTHを何とかして短くしたい訳だが、それは555の時定数設定を小さくすることによって可能になるのだ。勿論その場合はサンプルホールド側の積分時定数を小さくして適切なサンプルホールドDC電圧になるよう調整が必要だ。で、MK2の制御回路についてはこの調整後の設定が先生によって2種示されている訳である。そのうち旧単行本系の555の方が時定数が小さく、その結果TH=5.445mS(33rpm)、4.235mS(45rpm)なのに対して、No-124系では積分時定数が大きいためTH=6.05mS(33rpm)、4.598mS(45rpm)。その差は0.605mS(33rpm)と0.363mSである。千分の0.6秒と千分の0.36秒の違いだが、やはりこれだけでも早いほうが良さ気なのだ。
次に位相制御だが、こちらはTHの時間は制御の早さに関係しない。こちらの場合はそれよりも積分回路による三角波の立ち上がりの早さの方が重要だ。何故なら、位相制御部のフェーズ・コンパレータの出力は、モーター回転が定常状態に達してFGパルスがクロックパルスに同期して位相差なく回っている限り0Vなのである。こちらの積分回路に求められるのは、その状態に何らかの外力が加わってモーターの回転が遅れたり進んだ瞬間、フェーズ・コンパレータのプラス又はマイナスのパルスの出力に応じて素早く三角波が形成されるか否かなのだ。要するに出力0の状態から如何に早く三角波が立ち上がるかがポイントなのだ。何故ならその三角波のピークが制御信号の大きさに直結しているから。そのため何よりも素早い立ち上がりが重要なのだ。このような視点で上のシミュレーション結果を見ると一目瞭然で積分時定数の小さい旧単行本系の定数設定の方の立ち上がりが早い。旧単行本系は3波でほぼ定常に達するのに対してNo-124系は6波を要している。時定数の設定どうりに2倍の時間を要する訳だ。やはりこちらも積分時定数は小さい方が良さ気なのだ。
この点、実際にPSpice(評価版)で観てみよう。例えばMK2が33・1/3rpmで定速回転中何らかの要因でクロックパルスとFGパルスに1mSの位相差が生じた場合。
まずはNo-124系の定数設定
次に旧単行本系の定数設定
わォ!(°° とまぁ、違いは明らかだ。
ということを考えるにつれ、我がNo-124制御アンプの積分定数の設定を旧単行本系に変更したくなったという訳なのである。
が、先に引用したとおり、No-124と同回路のNo-112の記事には、「本システムでは前回と異なり、積分時定数を大きくした方が安定になる。」とある。ということはNo-124の回路に旧単行本系の積分時定数を用いた場合動作が不安定になるという意味だわなぁ・・・。
が、やってみなけりゃ分かるまいて。と思ってやってしまったのだった。(^^;↓
最初積分回路の方だけ速度側56kΩ+0.1uF、位相側27kΩ+0.1uFに変えただけでモーターにつないでやってみたところ、やはり速度調整で定速まで達しない。トリマーを最大に回しても回転が遅い。
のは当然なので、555の時定数設定も変える。が、手持ちに5kΩのトリマーがない。やむなく2kΩのトリマーはそのままで固定抵抗の方でマッチする抵抗値を探ったところ33・1/3rpm側は20kΩ、45rpm側は16kΩで上手く行った。で、位相調整トリマーの方を右に回して位相ロックが掛かるかどうかやってみたところ・・・、あっけなく8時の位置でロックも上手く掛かるのだった。その状態が上の写真なのである。
結果、動作には全く不安定そうなところはないぞ・・・。
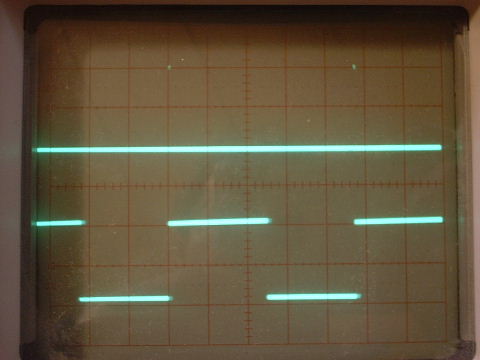
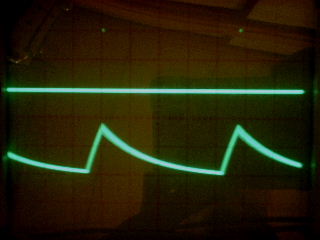
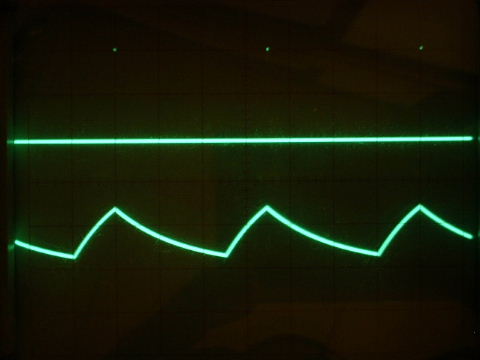
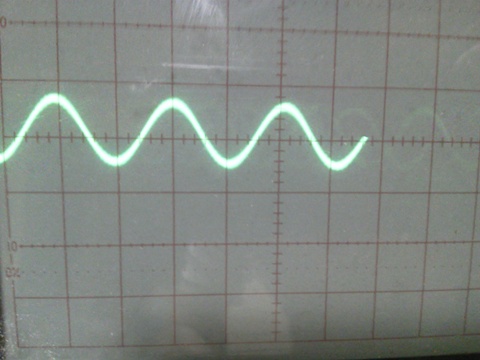
で、これ↓が位相ロックが掛かってクロックパルスとFGパルスが同期した時点のオシロ写真。左が331/3rpmで右が45rpm。
右左とも上がクロックパルスで下がFGパルス。時間軸(2mS/div)からクロックパルスの周期を読むと331/3rpmの方は9.5mS、そしてTHは5mS程度と読める。45rpmの方はクロックパルスが7mSで、THは4.1mS程度と読める。
ので、良いのではないでしょうか。(^^)
 |
 |
と言うのは、これがその積分時定数設定等の状況を上の表と同様に計算でまとめたものなのだが、FG周波数もTHも良く一致している。

さて、問題は音だ。
が、・・・・・・
わォ!(°° 付帯音が減り、より繊細に、クリアーに、コントラスト鮮やかに、そして静かに、音がいーっぱい聞こえてくる…楽器を演奏する指先に、息に、奏者が注いだ神経の細やかさがひしひしと伝わってくるよう…もともと視力2.0で見えていた景色が、5.0で見えるようになった感じ。
とtetsuさん仰るまでには、語彙に乏しく、かつ駄耳の私には言えないのだが、(^^; そこはかとなくそんな感じがするではないか。\(^○^)/\(^○^)/
なので、この設定で行くことにした。(^^)
とまぁ、こんな訳でSP-10MK2の制御アンプについては積分回路の謎は解けたように思うのだが、オリジナルSP-10の制御回路のそれはどうか。
これはなかなか難しい。と言うのは新単行本に掲載された制御アンプのゲインコントロールアンプのゲインがLM13600Nと同等なのか不明であるし、モータードライブアンプのゲイン設定も以前の制御アンプのそれよりも大きい点で、以前の制御アンプとトータルのゲインが同じなのか否かが不明だからである。
が、新単行本のSP-10MK2用の制御アンプの積分回路と555の時定数設定は旧単行本系と全く同じであり、また、加算アンプのゲイン設定とゲインコントロールアンプ入力におけるアッテネータの設定も同じであるから、この点からは新制御アンプのトータルゲインは旧制御アンプ群と同じ設定にしてあるとも解釈できる。
だが、そうなると今度はSP-10MK1用の新制御アンプの積分回路の設定が謎になってしまうのだ。再掲したこの表のように、その積分時定数が旧制御回路の半分の新制御回路では、速度側のサンプルホールド回路でサンプルされるべきDC電圧が3.07V(33rpm)と2.92V(45rpm)と、旧制御回路の場合に比して33rpm時で0.63V、45rpm時で0.6Vも高くなってしまうのである。
これでは、新制御回路のトータルゲインが旧制御回路と同じであった場合、モーターは設定速度には達しないだろう。事実tetsuさんの旧制御アンプの速度側積分時定数を新単行本の定数にした場合、モーターの速度は定速に達しなかったと報告されている。サンプルホールド電圧が上がって、その結果反転アンプである加算アンプの出力は逆にマイナス側に下がるから、結果、ゲインコントロールアンプのゲインが下がり、最終的にモータードライブアンプの出力が小さくなったのだ。
したがって、新単行本のSP-10MK1の積分回路の謎については二つの解が考えられる。一つは勿論100kΩ+0.1uFという設定が間違いかミスプリであることだ。
そうであれば、ここは旧制御回路のように100kΩ+0.22uFが正解だ。
二つは新単行本の積分回路の時定数設定には誤りがなく、その場合必要となる555の時定数設定の方の変更が回路図や基板配置図の方に反映されていないということだ。
位相側についてはその量はトリマーで調整されるものであるから、前述したように時定数は小さい方が良いという意味においても100kΩ+0.1uFの設定で問題なく、かえって良いはずだ。であるから、こういうことも考えられるだろう。
では、この場合であれば、555の時定数設定は本当はどうなるのであろうか?
は、例によってまたPSpice(評価版)に占ってもらう。
結果はこう。

すなわち、555の時定数設定は33rpmの方は27kΩ+5kΩ(半固定)、45rpmの方は20kΩ+5kΩ(半固定)にせよとのお告げだ。要するに33rpmで3kΩ、45rpmで2kΩ抵抗値を小さくすれば上手く行くよという予言である。
のだが、SP-10を動かしていない私にはこれは確かめようがない。(^^;
そして今ひとつ、私にはまだ確かめようがないものがある。
それはSP-10のFG周波数を、最新のNo-179と同様に、1周216個のストロボパターンを使って120Hz(33・1/3rpm)と162Hz(45rpm)とした場合、音的にもさらに良さ気なものになるのではないかなぁ、ということである。
上で速度制御について考えたとおり、例えば何らかの外力によりモーター回転がやや遅くなりつつある場合、FG周波数がやや低くなって周期TがT’に伸び、次の制御信号を出すまでの時間はT’+THになってしまう。素早い制御で回転速度を定速に戻すためには当然この時間は短い方が良い訳だ。そしてそのためには、はっきり言ってしまうと、今回やったようにTHをちまちまと短くすることよりも、そもそものT’自体が短くなるようにした方が効果は断然大きいに決まっているのだ。
で、そのためにはどうすればよいのか?と言えば、FG周波数を高くする、言い換えればサンプリングレートを上げれば良いのである。そうすれば、さらに良い結果が得られるに違いないのだ。
残念ながらこれはSP-10MK2では試せない。何故ならこれの内蔵FGの周波数は変更不可であるし、FGパルスをプラッターに付いているストロボパターンから作ったとしても、MK2のプラッターのストロボパターンは190本の1種類のみで、これから出来上がるFG周波数は内蔵FGによる周波数と同じにしかならないからだ。う~ん、残念。
それがSP-10及びその一卵性双生児機種たちならば可能なのだ。
そこで、いつの日かのために、その時必要となる積分時定数設定等をまとめておこう。

もとより、モーター及びプラッターという、質量及び慣性のあるものの制御であるから、その制御量及び制御速度もただ速ければ良いというものではなく、適正値、適正速度というものがあるはずだ。
とは思うのであるが、位相側の積分時定数をもっと小さくしてみることも含めて、この辺、いつかは試してみたいものだわん。
(おまけ)
どうしようかと思ったが、やはり最後に触れておこう。
No-179のSL-1100用のターンテーブル制御アンプなのだが、これの回路図の積分回路の設定と555の時定数設定は謎だ。
そもそもこのNo-179、基板配置図にはミスがてんこ盛りだし、回路図においてもGP2S22のK、Eがアースに繋がっていたり、位置信号発信器のTL082の出力が帰還ループの方に繋がっていなかったりと、信頼度がかなり低いのだが、はっきり言って、回路図の積分回路の設定と555の時定数設定では、SL-1100のモーター、回らないのでは? (^^;
(2006年1月8日)
(その後の3:位相制御を完全対称にする)
早くも訂正。過ちを改むるに憚ることなかれ。(^^;
ありゃ(。。 間違えた。
と、No-124の記事の図7、位相制御部のタイムチャートを改めて見ていて気づいたのである。
なんと、位相制御部は、進み位相については積分して生じる三角波の山の頂点をサンプリングするのに対して、遅れ位相については三角波の谷の頂点をサンプリングする方式なのではないか。これを両方とも山の頂点をサンプリングするものとすっかり思いこんでいたのだ。これまでも何度も見ているのに全く気づかなかった。進み位相の場合に発生するのが+5Vのパルスで、遅れ位相の場合は-5Vのパルスであるという事実をもとに線対称の視点で図を見れば一目瞭然にそんなことは分かるべきものなのだが、ただなんとなく図を見るとどちらの場合も山の頂点がサンプリングされているようにも見えてしまう・・・。心ここにあらざれば・・・。お恥ずかしい。(^^;
で、こうなると、位相制御部については積分回路による三角波の立ち上がりの早さが重要で、その立ち上がりは早ければ早いほど良いはず、という判断は適当ではないのである。
ので、訂正なのだ。
何故なら、上の積分後の三角波のシミュレーション波形を見ると明らかなように、積分時定数を小さくすると、三角波の山の頂点は高くなるのに対して、三角波の谷の頂点は逆に低くなってしまうのである。これは積分時定数を小さくすれば小さくするほど顕著になる。と言うことは、この積分時定数を小さくするほどに、位相制御は進み位相の場合に強く働き、遅れ位相の場合には逆に弱く働いてしまうということになるのである。
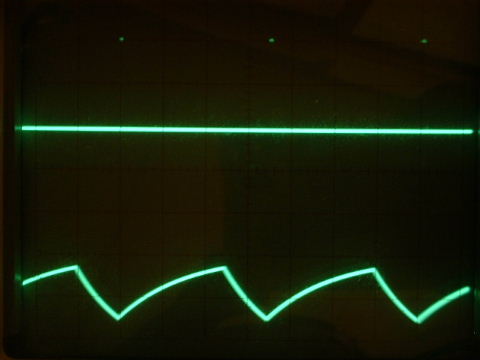
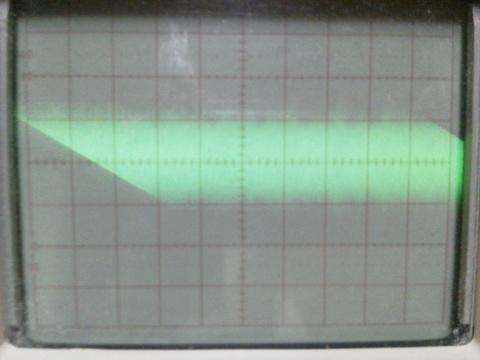
実際、我がNo-124の位相制御部の積分三角波の写真↓を見るとその事実が明らかだ。
左から積分R、Cが100kΩ&0.1uF、真ん中が51kΩ&0.1uF、そして右が27kΩ&0.1uF。どの場合も上の写真では進み位相1mS程度に、下の写真では遅れ位相1mS程度に揃えてある。もちろん、各写真とも上がクロックパルス(=サンプリングパルス)であり、下が三角波。軸は横軸は共通で2mS/divだが、縦軸はクロックパルスの方は5V/div、三角波の方は2V/divである。したがって、クロックパルスの方は横一線の直線が-5Vであり、点に見えるパルスの頂点が+5Vである。そして三角波の方は上下の三角波の間の軸が±0Vである。したがって、進み位相の方はプラス側に三角波が生じ、遅れ位相の方はマイナス側に三角波が生じ、上下の三角波は0V軸で線対称になる。
| 100kΩ&0.1uF | 51kΩ&0.1uF | 27kΩ&0.1uF |
 |
 |
 |
 |
 |
 |
これを見れば、まず、進み位相の場合はサンプリングが三角波の山の頂点で行われるのに対して、遅れ位相の場合はサンプリングが三角波の谷の頂点で行われることが明確だ。し、山と谷という対照的なポイントをサンプリングしていることから当然なのだが、サンプリング電圧の絶対値は進み位相のプラス側が大きく、遅れ位相のマイナス側はこれよりかなり小さいことが分かる。
次に、左から右に積分時定数が小さくなるほどに進み位相の方のプラス側のサンプリングポイントの電圧は2V弱から2V強、4V弱とどんどん高くなっていくのに対して、遅れ位相の方のマイナス側のサンプリングポイントの電圧は-0.5V程度から-0.25V程度、-0.1V程度と逆に低くなっていくことが分かる。その結果、写真でも明らかなように、積分時定数が小さくなるほどに進み位相の場合のサンプリング電圧と遅れ位相の場合のサンプリング電圧の乖離が拡大してしまう。
で、これは要するに何を意味しているのかというと、
①進み位相の場合と遅れ位相の場合で、TT制御アンプの位相制御は非対称であること。
②すなわち、TT制御アンプの位相制御は、もともと進み位相に対しては強く、遅れ位相に対しては弱く発動されるものであること。
③この非対称は、位相制御部の積分時定数を小さくするほどに拡大すること。
という事実なのである。
この結果、位相制御のための時定数は小さければ小さいほど良いはずとは言えなくなってしまうのだ。位相制御もNFBであるから、その意味では制御の発動は時間差なくなるべく早期になされた方が良いに決まっている。だから一般論として位相制御のための積分時定数は小さい方が良いということになる。が、この事実があるとなれば、そうはいかなくなる。③の如く、進み位相と遅れ位相の制御の非対称が拡大してしまうし、単に非対称なだけではなく、全体的に制御を強くしようとして積分時定数を小さくすると、進み位相側の制御は見込みどおり強まるが、遅れ位相側の制御は逆に弱まってしまうのだ。
そうであれば、この場合積分時定数は、進み位相の場合のサンプリング電圧と遅れ位相の場合のサンプリング電圧の絶対値があまり乖離せず、しかも、遅れ位相の場合でも遅れに比例してサンプリング電圧の絶対値が適切に上昇するよう、上手く積分時定数を調整することが何よりも肝要だ。ということになる。
なるほど・・・
そういう観点で、上でやったシミュレーション結果を改めて見てみると、積分時定数を決めるR&Cは27kΩ&0.1uFでは明らかに小さすぎ、100kΩ&0.1uFという、結局、No-124オリジナルの51kΩ&0.22uFの組み合わせと同程度の時定数設定がどうも最も妥当のようだ。
う~む、やはりオリジナルは偉大なのだなぁ。(^^;
これはオリジナルどおりの積分時定数に戻す以外にあるまいて・・・。
と、いうわけで我がNo-124の位相制御部積分回路も100kΩ&0.1uFに戻すことにしたのである。
・・・・・・・・・・・・・・・・・・・・・・・・
が、その音を聞いても、別に悪いわけではないのだが、やはり今一嬉しくない・・・。
これは調整という名の妥協だから。
・・・この位相制御のサンプリングの非対称をもし対称にする手段があれば、位相制御はもっと適正化され、音も絶対もっと良くなるはずではないか。という思いが消えない。
要するに遅れ位相の場合の三角波もその山の頂点でサンプリングすれば良いだけのことだ。何か手はないか。
数日間ない頭をあれこれひねっていたら筋を違えた、イテテテテ・・・
・・・・・・・・・・・・・・・・・・・・・・・・
が、あった。(°°!
な~んと、あったのだ。
しかも追加部品は一切不要。ジャンパー線を1カ所接続替えするだけで実現するのである。
歓喜雀躍!! \(^○^)/\(^○^)/
ほんとかいな。(^^;
で、問題はその手法。
なのだが、それを示すのがこの位相制御部のタイミングチャートだ。
上からクロックパルス、FGパルス、そしてフェイズ・コンパレーターが出力する制御パルスである。制御パルスは分かりやすくするため振幅を倍にしてある。
フェイズ・コンパレーターは、クロックパルスとFGパルスの正進行の時間を比較し、FGパルスの正進行がクロックパルスの正進行より早い場合は、FGパルスの正進行からクロックパルスの正進行までの間、0Vを基準に5Vの正パルスを出力し、その逆の場合は、クロックパルスの正進行からFGパルスの正進行までの間、0Vを基準に-5Vの負パルスを出力する。
これを積分回路で三角波に変換し、その三角波のある時点の電圧をサンプル・ホールドすることにより、クロックパルスとFGパルスの位相差=時間差に応じた制御信号電圧を作り出す訳だ。
だから、その電圧をサンプルするタイミングを何で規定するかが問題なのだが、K式TT制御アンプではNo-112以降現在までこれをクロックパルスで規定するクロックパルス方式が採用されている。
クロックパルス方式はクロックパルスの正進行の時点でサンプリングを行う。そうすると左のタイミングチャートのとおり、FGパルスが進んでいる時には三角波の山の頂点をサンプリングするのに対し、遅れている時には三角波の谷の頂点をサンプリングすることになる。この結果、制御信号電圧は、進み位相の場合と遅れ位相の場合で非対称となってしまう訳だ。
No-112以前は、サンプリングをFGパルスの負進行の時点で行うFGパルス方式が採用されていた。この方式だと左図で明らかなように、三角波の山又は谷の頂点からややずれた地点でサンプリングすることとなる。
面白いことに、この結果制御信号電圧の非対称についてはかえって緩和されることが分かる。そのためFGパルス方式では位相制御部の積分時定数をクロックパルス方式より小さくすることが可能なのだ。FGパルス方式時点でのSP-10MK2用制御アンプの位相制御積分回路は27kΩ&0.1uFだったのが、クロックパルス方式に変わったNo-112において、「本システムでは前回と異なり、積分時定数を大きくした方が安定になる。」とされ、51kΩ&0.22uFという4倍も大きい時定数が採用された理由はここにある訳だ。
で、この点から見ればFGパルス方式にはメリットがありそうだ。が、だからと言ってFGパルス方式で非対称が解消するわけではない。
この非対称を解消するためには、フェイズ・コンパレーターが出力する制御パルスが正の場合にはその負進行のタイミングで、制御パルスが負の場合にはその正進行のタイミングでサンプリングを行い、共に三角波の山の頂点を捉えるようにすれば良いことは明らかだ。そしてこれは前者をクロックパルスの正進行のタイミングで、後者をFGパルスの正進行のタイミングで行えば良いことも容易に分かる。が、それは新たなロジックを組まずには達成できない・・・。
何か手はないか・・・と、フェイズ・コンパレーターTC5081APのデータシートを眺めていたら、そのタイミングチャートに唖然となった。えぇぇ・・・。あるじゃないか。(。。
PHASE OUT!!
なんと、これはクロックパルスとFGパルスの進みと遅れを区別せずに位相差のある期間だけ負パルスを出力するのだ。だから、クロックパルスに換えてこのPHASEOUTパルスを使用してこのパルスの正進行のタイミングでサンプリングを行えば、共に三角波の山の頂点を捉えることが出来、制御信号の非対称は解消され完全対称になるぞ!
というのがこの図一番下のPhaseOutパルス方式だ。しかも、この方式は回路図でMC14528Bの4番ピンからTC5081APの7番ピンを経由してCD4059Aの23番ピン(要するにクロックパルス)に繋がっていて、実際の配線もジャンパーでそうなっているところを、MC14528Bの4番ピンからTC5081APの7番ピンへ行っているジャンパー線をTC5081APの遊んでいる4番ピンへ繋ぎ替えするだけで実現するのである。一切追加部品、追加配線不要!
で、一カ所配線替えして“完全対称制御”が実現したのである。
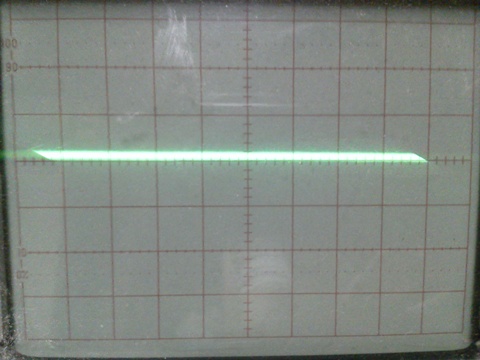
これ↓がその証拠写真だ。
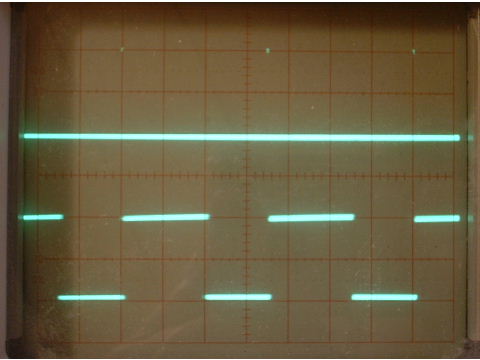
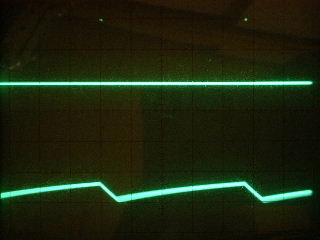
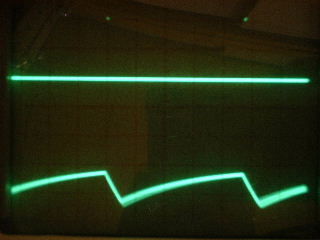
見方は上の写真の場合と同じだが、こちらでは上はサンプリングパルス。左が33・1/3rpmで回転中のもの、右が45rpmで回転中のものであり、位相制御部の積分回路のCRの組み合わせはともに27kΩ&0.1uFである。
で、それぞれ上の写真が2mSの進み位相状態であり、下の写真が2mSの遅れ位相状態であるが、進み位相の場合も遅れ位相の場合も等しく三角波の山の頂点、すなわちプラス側は3V、マイナス側は-3Vの地点でサンプリングがなされていることが分かるだろう。
すなわち、この結果、オリジナルと違って位相制御が進み側、遅れ側で完全対称になるのである。\(^○^)/
| 27kΩ&0.1uF 33・1/3rpm | 27kΩ&0.1uF 45rpm |
 |
 |
 |
 |
が、フェーズアウトパルス方式にも欠陥がある。
当初これは致命的欠陥ではないかと思った。
と言うのは、上のタイミングチャートで明らかなように、フェーズアウトパルス方式ではクロックパルスとFGパルスが完全に同期した状態、すなわち位相差0が検出できないのである。したがって、モーターの回転が折角位相差0の理想状態になった時点においても、その直前のサンプルホールドによる制御電圧が継続してしまう。これはある種誤検出とも言えるだろう。このことがどういう事態を招くのかについて色々想像して大丈夫かどうかあれこれ考えたのである。
が、しばし考えてみて、これは大した問題ではないとの結論に達した。
こういう回転動作においては、完全無摩擦状態で慣性回転していない限り定速で回転することはありえず、したがって外力による制御でこれを定速に維持する訳だが、この場合、摩擦による減速と外力による加速によって位相差0の理想回転の近くをミクロレベルで振動させながら回転させ、必要なマクロレベルにおける定速回転を実現する以外の現実はないからだ。こうして現実的に実現する定速回転はその振動が小さいほど理想に近いということであろう。と考えると位相差0の検出は特に重要ではないのだ。位相差0を検出するより、むしろ微少な位相差を検出し素早く適切な補正をする能力の方がよほど重要だ。
そして、このようなミクロな視点から観るとクロックパルス方式とFGパルス方式の方にも欠陥があるということが、このタイミングチャートで分かるのだ。↓
これは、定速よりやや早い回転状態から徐々にスピードを減じ、結果、進み位相状態が位相差0を経由して遅れ位相となる場合の制御パルスと積分回路による三角波、及びサンプリングのタイムチャートなのだが、これで、
・FGパルス方式は、微少な進み位相及び微少な遅れ位相の両方が検出できず、これを位相差0と誤検出してしまう。し、
・クロックパルス方式は、微少な進み位相は検出できるが、微少な遅れ位相が検出できず、これを位相差0と誤検出してしまう。ということが分かるのである。
まぁ、この図では三角波の充放電スピードが対称となっているが、実際は放電スピードの方が遅く本当は放電側の傾斜がもっと緩やかなので、これほど明確で極端ではないのだが、理念型としてこの結論に間違いはない。
そして、これらに対し、フェーズアウトパルス方式は位相差0こそ検出できないものの、微少な進み位相も微少な遅れ位相も検出できるのである。
どちらが重要だろうか?と考えると位相差0を検出するより、微少な進み位相も微少な遅れ位相も検出できることの方が重要であるに違いないのだ。
だからフェーズアウトパルス方式を採用する以外にない。というのが結論だ。(^^)
さて、そこでだ。
フェーズアウトパルス方式なら位相制御部の積分回路による三角波については、基本的に立ち上がりの早さが重要で、その立ち上がりは早ければ早いほど良いはず、という最初の理屈が妥当性を持つことが明らかだろう。クロックパルス方式やFGパルス方式のように、遅れ位相の場合のことを考えて妥協する必要は一切ない。理想的な制御条件を追求すれば良いだけだ。
但し、勿論時定数を小さくしすぎた場合は、進み位相又は遅れ位相の度合いに応じて制御信号をコントロールするということができなくなる。ので、これにも適正範囲がある。
が、この適正範囲内で最も適切な時定数を選べば良いのだ。
だからPSpice(評価版)で、我がNo-124の33・1/3rpmの場合を例に(すなわちFGパルスのT=9.479mS)、位相差が生じた場合の積分三角波のピークが積分回路定数によってどう変わるのかを予言してもらおう。もっとも妥当な積分定数を考えてみるのだ。
ポイントは、位相差が0から最大の9.479mSまでの間で、その差にどう対応した三角波のピーク電圧推移になるかである。基本的には微少な位相差の時点で三角波のピークが立ち上がるべきだろう。だが、その立ち上がりが位相差に比例することも重要だ。し、それらが電源電圧の5V内に収まり、かつ、5Vを使い切ることも重要だ。さらに、最大電圧に立ち上がるまでの時間も重要な判断要素だ。
まずはやってみよう。
 2.7 2.7これは積分回路が27kΩ&0.1uFで、位相差が2mSの場合。 結果、ピークは2.7V。 この時定数だと、1波目で殆ど最大ピークと同レベルにまで立ち上がっている。 V |
 |
 同じく積分回路が27kΩ&0.1uFで、位相差が4mSの場合。 ピークは4.0V |
 |
 同じく積分回路が27kΩ&0.1uFで、位相差が6mSの場合。 ピークは4.6V。 |
 |
 同じく積分回路が27kΩ&0.1uFで、位相差が8mSの場合。 ピークは4.9V |
 |
と、このようにして積分回路の組み合わせ毎にシミュレーターが計算した結果はこうである。、
0.5mS 1mS 2mS 4mS 6mS 8mS 9mS 13k&0.1u 1.6V 2.7V 3.9V 4.8V 4.95V 5.0V 5.0V 27k&0.1u 0.9V 1.6V 2.7V 4.0V 4.6V 4.9V 5.0V 51k&0.1u 0.6V 1.1V 1.9V 3.2V 4.1V 4.7V 4.9V 100k&0.1u 0.4V 0.8V 1.5V 2.7V 3.7V 4.5V 4.8V
これをエクセルでグラフにするとこうなる。
当然、積分回路の時定数が小さいほど三角波のピーク電圧は高くなる。が、位相制御の量についてはVRで調整されるのでピーク電圧の高さ自体はあまり問題ではないと思われる。それよりもグラフの傾きに表れているように、時定数が小さいほど位相遅れの少ない段階で制御電圧が早めの時間に立ち上がり、時定数が大きいとこれが緩やかになるという点や、時定数が小さい場合は三角波の立ち上がりの1波目でほぼ定常電圧まで立ち上がるのに、時定数が大きくなるほどに定常電圧まで立ち上がるのに必要な波数が必要で、このため実質の電圧はこのグラフより低くなるといった点をどう評価するだろう。
そして、わたくし的には、三角波の立ち上がりの早さ、制御電圧の立ち上がりの早さ、位相差量に対する発生電圧の比例度、そして電源電圧の5Vを上手く使い切れるなどの観点から、最も妥当ではなかろうかとの判断で27kΩと0.1uFの組み合わせを選んだのである。実際12k&0.1uFも試してみたのだが、その場合は制御が過剰気味となるようで、どうもこの辺が良いところのようだ。
結果、わたくしの耳では・・・、あまりにも良い。のではないでしょうか。(^^)
この音のスタビリティは比類がない。し、時間軸に閉じこめられていた音魂がくびきを解かれて舞うが如く、強靱で高速で微細で豊かで、かなり生感覚に近いものが得られるようになったような気が・・・(^^)
警告:この件に興味を持たれて同様な改造を施し、結果、何も変わらなかったり、かえって音が悪くなったり、あるいは機器を壊したりしたとしても一切関知しない。ので悪しからず。(^^;
(2006年1月20日)
(完成記念試聴 その2)
・harmonia mundi HM-379-B
(写真は日本ビクター VIC-28123)
・TARANTULE~TAENTELLE
・GREGORIA PANIAGUA
・1976年10月の録音
・またしてもパニアグアから。(^^;
・長岡鉄男氏が「鮮烈、強烈、輪郭鮮明でリアルそのもの、ハープシコードもいいが、カスタネットが絶品。」と別冊FMファンで評されたとか。正にそのとおりだ。鮮烈、強烈、輪郭鮮明というと何か強調して色づけしているものであるかのようにも思えてしまうが、そうではなく、生の楽器の音自体がもともと鮮烈、強烈、輪郭鮮明なものなのであって、それがぼけずに、そこにあるが如くの鮮度で聞こえてくるということだ。しかもちゃんとした距離感と空気感が保たれているところが“リアルそのもの”の評の所以だろう。確かにチェンバロをはじめこの楽器のパルシブな炸裂音こそ要するに“普通”なのだ。
・古楽療法「タランテラ」との邦題だが、毒グモ“タランテゥラ”の唯一の解毒手法である踊りの舞曲が「タランテラ」ということらしい。で、なんと、グレゴリオ・パニアグアは医学を修めた学士でもあったとのこと。
・濱田滋郎氏が「パニアグアが余念なく調合精製してきた幾多のレコードは、思えばこれすべて、精神的・知的束縛にあえぐ現代人への、ヒューマニズムあふれる音楽療法の秘術にほかならなかったのだ。」と書いておられるが、本当にパニアグアの意図がそこにあったかどうかは別にしても、彼の音楽に人間観察的と言うか哲学的なスパイスを感じるのは確かで、彼は医学的知識も駆使し、古楽を通じて音楽の持つ呪術性や精神性、心理的側面を操っている正に芸術家であったという訳だ。
・Grammofon AB BIS LP-221
・CANTIGAS DE SANT MARIA
・JOCULATORES UPSALIENSES
・1982年11月5日&7日、スエーデンのウィックス城で、ノイマンU-89 2本とルボックスA-77、テープはAGFA PEM468によりノンドルビーで録音とある。
・JOCULATORES UPSALIENSES もパニアグアの楽団に似て、主に13世紀から17世紀の古楽の再生を目指したグループのようだ。ジャケットの写真にも珍しげな楽器が写っている。ここではイベリア半島の古楽が主題であるから、パニアグアに近く思えるのも当たり前だが、こちらはコーラスにも力が入っている。
・“聖母マリアのカンティガ集”。一聴にして清澄、透明、かつ芳醇。古楽器の響きも実に良いが、澄んだ歌声がまた素晴らしい。そして、古太鼓に揺さぶられる空気感や、コーラスの生々しさ、広く深い空間感もぞくっとするほどで、そのリアルさは圧倒的だ。
・音楽としても素晴らしく、心が芯から安まる。もともと聖母マリアの奇跡物語で、様々な階層の人々が危機に陥ったり、悪行に溺れそうになったなったときに、聖母マリアが現れて救済したという内容が主題らしいから、それも当然だろうか。
・proprius PROP 7762
・CANTATE DOMINO
・Org:アルフ・リンダー,S:マリアンヌ・メルネス,トルステン・ニルソン指揮オスカルス・モテット・コーラス
・1976年1月23~25日、4月29日ストックホルムのオスカル教会での録音とある。
・日本においても超有名なレコードであるらしい(最近手に入れるまで知らなかった(^^;)ので、何も言うことはないのだが、位相制御回路のサンプリング方式変更の効果か、近頃ますますこのレコードの本領が発揮されるのである。
・北欧というのは一度も行ったことはないが、多分透明で凛とした空気に覆われたクリアネスな世界なのだろう。広大な教会のクリアな空気空間の中で美しいコーラスを間近に聴いて、心洗われ、実に晴れやかな気分になってしまう。
・アルフ・リンダーのパイプオルガンもまた素晴らしい。神が与え給うた大地の福音を得て人は生きているのだなぁ・・・と想起させてくれるではないか。
・クリスマスとは神の福音を給わって生きるている我が生を喜び、その福音に感謝する日なのだ。と、このCANTATE DOMINOを聴いて心から思えてしまうのだった。(^^)
・東芝EMI LF-91010
・三味線の魅力
・録音年月日は不詳だが、東芝EMI音響技術部がそのもてる技術を駆使してレコードを出していた頃のもののようだ。その名もプロユース・シリーズ。録音機器やマイクアレンジ、イコライズの内容などが細かく記載してある。マイクはノイマンM296C、エレボイRE20、シュアーSM5、AKG D224、ショップスM221B、テープレコーダーは3M 16CH、STUDER A80、モニターはJBL4331にアルティック604Bといった具合。
・で、完璧なマルチマイク録音である。結果、実にクリアで細かく明解な音が録られている。これもパルシブな炸裂音がふんだんに入っており、なまじの装置では真価が発揮されないかもしれない。
・特に2面がなかなかに面白い。大太鼓に太鼓、鼓に笛、鐘、囃子も入って微妙に霊験かつ華やかで、邦楽も悪くはないものだと認識されられるのだった。
・が、上の3枚と鳴りようが明確に異なるのは、音色は実にリアルなのだが、音場がないことだ。要するに個々の音だけが録られていて楽器全体やその周辺の空気感が録られていないのである。だから、三味線に大太鼓や鼓、鐘、笛、囃子などによる合奏の際もそれらがスピーカーの間に優劣無く並んで出てくるので、上3枚のような音の出方に馴れている場合、これは実に気味が悪く、人によっては気分が悪くなってしまうかもしれない。多分いわゆる“難聴マルチマイク録音”ということになろうか。(^^;
・って、まぁ、世の中のレコードにはこちらの鳴り方をするものが多いとは思うのだが・・・(^^;
・JVC SJX-9548
・雅楽 秋庭歌一具
・武満 徹
・MJ1980年7月号に紹介されているように、同年5月3~4日に3Mの32chデジタルレコーダーによってデジタル録音されたもの。
・これもマイク20数本を駆使したマルチマイク録音だ。実はMJの紹介記事にあるように、この模様は並行してDCマイクによってワンポイント録音されていたらしいのであるが、ざーんねんながらそれは使われることなく、したがってその音は知る由もない。
・マルチでデジタルでは上の三味線以上に音場は不自然か、というとそこはかとなく空間感もあって案外そうでもないところは不思議なところだが、やはり作られた音場という感は否めない。が、なかなか上手く拵えてあって、シルクロードを遙かに伝わってきて雅楽として結実した実に異質性な時空間が案外上手く醸し出されており、時にはこういうものも良いものだ、と思わせてくれるのだ。
・笙など雅楽の楽器(良く名前も知らない(^^;)も実にパルシブだから、オーディオ的にも面白い素材。
・EWE EWLP0011
・LIFE
・綾戸智絵
・1999年5月7,9,10&11日にONKIO HAUSで録音
・近頃は綾戸おばちゃんもすっかりポピュラーになられているのだが、わたくし的にはそれに反比例するかのように最近はちと遠ざかってしまっている。(^^;
・これはどちらかというと初期の頃の作品で、LPで限定プレスされたもの。
・基本的にはピアノの弾き語りだが、曲によってドラムとベースが入ってトリオにもなる。
・テレビ等でこの方が弾き語りしている姿も目にするので、これも弾き語りでの録音だと思うのだが、残念ながら、録音的にピアノと声は全く別系統なのだろう、音場的に弾き語りの雰囲気はない。声(口元)が前に出過ぎる。のは商品としては当然の措置か。(^^; だからそう思って聴くと気持ちが悪い。ピアノとは別におばちゃんが歌っていると思った方が気持ち悪くならずにすむ。
・ピアノもベースもドラムもさすがに現代録音だから、悪いはずもない。
CD版よりも良い音がするような気が・・・(^^;
・願わくはピアノの空間と声の空間(エコー空間がイマイチ)を共通にしてくれたらもっと素晴らしいと思うのだが、それは無理と言うものか(^^;
・TBM TBM-30
・MISTY
・山本 剛トリオ
・1974年8月7日にアオイ・スタジオで録音
・言わずと知れたthree blind miceのMISTY。が、オリジナルではなくて1995年に再カッティングされたSUPER-CUT ANALOGUE DISKの方である。
・で、TBMと言えばレコーディング・エンジニアは神成芳彦氏である。これも勿論マルチマイク録音で、ピアノにはエレボイのRE20Bが2本にノイマンのM49Cが1本の計3本、ベースにはノイマンのM49CとU67、さらにエレボイのRE20Bの3本、そしてドラムにはノイマンのM49C、ソニーC37A、C55A、C37A、エレボイRE15×2、そしてAKGのD20と7本ものマイクが使われている。で、マスターレコーダーは3MのS-79でテープはスコッチ206とある。
・結果は勿論素晴らしく鮮烈な音で、当時74年度SJ誌のジャズ・ディスク大賞 最優秀録音賞を受賞したもの。
・その音は今聴いても実に強烈で、最近の録音などどこも進歩しておらんわなぁ・・・と。(^^;
・勿論マルチマイク録音で音場感には欠けるのだが、こういうピアノトリオのジャズというのはそもそも酒場で近接して聴くべきもので、最初から音場感などないのだから、そうであるならばこうして楽器に耳を突っ込んだような録音を我が部屋でスピーカーで鳴らすと、うまい具合にぴったりといった感があって、結果これはこれで良いと思うのである。
・だから許す。(^^;
・AARDVARK AV-9001
・私の声が聞こえますか
・中島みゆき
・1976年2月17~24日 Epicurus Studioで録音
・かみさんのための1枚。
・日本の歌姫、みゆき嬢もいまやかなりのお年になられたものとご推察申し上げるのだが、この方が“時代”を引っさげてコッキーポップで登場した頃をリアルタイムで覚えている、と言ってしまっては自分の年もばれてしまうか・・・(^^;
・この方の楽曲は、人のさが、ひいては情というものをさらりと深く、悲しく、鋭く突いて、結果絶大な共感を得て現在に至っているが、まぁ、天才だろう。結果、かみさんばかりではなく、私も聴いてしまっているのである。(^^;
・そのLPは数あれど、オーディオ的に見ると優れていると言えるものはあまりないのが不幸なのだが、このファーストアルバムは、楽器編成もシンプルでほとんどいじらずに作ったと思われ、結果、若々しいみゆき嬢の声も伸びやかに自然に入っていて良いのではないでしょうか。
・しかし、天才というものは最初の作品から天才である、ということがみゆき嬢にもあてはまりますねぇ。
・あぁ・・・、まわるまわる時代は回るのだ・・・
・SONY 15AC675
・MAHLER SymphonyNo1“The Titan”
・ブルーノ・ワルター指揮ニューヨーク・フィルハーモニック
・1954年2月15日録音
・ま、国内版である。しかもモノラル録音。優秀録音盤という訳ではない。
・が、モノラルとは思えない音場感で、古い録音の割には音域もピラミット構造的にほどほどの広さを持っており、ワルターの素晴らしい演奏が楽しめた。
・マーラー29歳での作品。
そうなのか・・・。まぁ、マーラー作品について私がどうこう言ったところでしょうがないので言わないが、瑞々しく若々しい第1番も良いものだわぃ。(^^)・proprius PROP 7778-79
・Jazz at the Pawnshop
・Arne Domnerus:ALTO SAXPHONE and CLARINET
Bengt Hallbelg:PIANO
Lars Erstrand:VIBES
Georg Riedel:BASS
Egil Johansen:DRUMS
・1976年11月6~7日、ストックホルムのStanpen jazz clubでのライブ録音。
・これまた超有名なレコードであるらしい。のは最近手に入れるまで知らなかった(^^; のだが、さすがにオーディオファイルご推奨のレコードと言われるだけのことはある。
・ワンポイント録音ではないのだが、 SAXPHONEやピアノ、ビブラフォン、ドラムなどそれぞれの楽器がまるで目の前で演奏されている如くに非常に生々しい。上のthree blind miceのように楽器に耳を突っ込んだような音ではなく、要すればオフマイクの音取りなのにかえって生々しいのだ。個々の音は非常に鮮明でありながら、空気感、距離感も醸し出されており、Pawnshopで今正に彼らの演奏を聴いているが如きである。実に上手く拵えてある。
・上のミスティーで「こういうピアノトリオのジャズというのはそもそも酒場で近接して聴くべきもので、最初から音場感などない」などと言ってしまったのだが、それはやはり暴言だったか。(^^; アコースティックに演奏・録音すれば音場感がないということはないよなぁ・・・というレコードだ。演奏自体も非常に素晴らしく、演奏、録音とも優れた、ジャスレコードには稀な一枚。
・惜しむらくはベースがアンプを経由したような音である点だが、これはもともとの楽器としての音量差からライブでもそうせざるを得ないはずなので、まぁ、しょうがないか。
(2006年1月29日&2月11日)
(FG信号をちょっとStudyする)
| ・SP-10MK2のターンテーブル制御アンプにおいては、位置信号発振器が発生する位置信号が微弱なFG信号に混じってしまう。 ・具体的には33&1/3回転におけるFG信号は±10mV程度であるのに対して、時空を超えた新単行本上巻P175に記載されているとおり、位置信号はこの10倍、すなわち±100mVのレベルでこれに混じってしまう。 ・だから、このFG信号と位置信号が混じってやってくるFGからの起電力から、FG信号の10倍の大きさの位置信号を除去しないと、コンパレーターがマルチプルトリガーを起こし、結果、ターンテーブル制御アンプが適切に動作しないという事態に陥ってしまう。 ・また、何事も完全ということは困難なので、位置信号の除去にも限界があり完全にはゼロに出来ない。ので、コンパレータの方にヒステリシス、要するに不感帯を設定し、FG信号レベル>ヒステリシスレベル>除去後の位置信号レベル、となるようにすることによりコンパレータの的確な動作を図るのである。 ・したがって、ここが上手くいかないとSP-10MK2のターンテーブルは上手く回らない。 ・現実にも、SP-10MK2用ターンテーブル制御アンプの製作を志す多くの方がここの部分で上手くいかず挫折する例が多いようである。 ・ので、その要因をLTSpiceで観じてみる。 |
| ・ここで最も重要なのは位置信号の除去である。 ・幸い、FG信号は100Hz程度、位置信号は90kHz程度と100倍近くも離れているので、CRフィルターで分離を図る。というのが方策になる。 ・まず、ツインTトラップ。 ・設定周波数の信号を選択的に減衰させる機能を有するフィルター。 ・設定周波数=1/2π・√((1/C1+1/C2)/C3・R1・R2)=1/2π・√((1/C1・C2・R3・(R1+R2)) ・で、1/2π・√((1/C1+1/C2)/C3・R1・R2)=1/2π・√((1/C1・C2・R3・(R1+R2))が成り立つために、R3/C3=(R1//R2)/(C1+C2)となるようにパラメータを設定する必要がある。 ・が、C1=C2、R1=R2、R3=R1/2、C3=2*C1とパラメータを設定すれば、概略設定周波数≒1/(2πC1R1)で当たらずとも遠からず。 ・で、右の場合1/(2πC1R1)≒94.6kHz。厳密計算では97.5kHz。 |
 |
| ・LTSpiceの占うそのゲイン-周波数特性。 ・設定周波数で急激にゲインを減じるので、設定周波数の信号を急激に減衰させることが分かる。 ・これなら100Hz付近のFG信号はそのまま通過させ、90数Khzの位置信号は問題ないレベルまで減衰するだろう。 |
 |
| ・ちょっと見にくいので、100kHz周辺の周波数軸を拡大すると、 |
 |
| ・こうなっている。 ・これを観ると、確かに97.5kHzの設定周波数の信号については-40dB以上減衰させることが分かる。から、FG信号の10倍の位置信号がFG信号の1/10以下に小さくなるだろう。 ・が、問題は、あまりにその周波数選択性が鋭く狭いことである。 ・肝心の周波数発振器の発振周波数がそもそも93.2kHzとツインTトラップの97.5kHzと同じではないし、それぞれの回路のC、Rに精度5%のものなどを使用すれば、発振周波数もトラップ周波数もかなりばらついてしまう。 ・右図から、発振周波数が10kHzずれると減衰量は-25dB程度になってしまうことが分かる。 ・最終的にはコンパレータ―のヒステリシス設定でなんとかすることを考えても、-30dBから出来れば-35dBの減衰量が欲しい。 ・ので、位置信号発振器の発振周波数とツインTトラップの設定周波数は±5kHz以内に収まらないと上手くなさそうだ。 |
 |
| ・そこで、位置信号正弦波の周波数を僅かに変えながら、105.5HzのFG信号正弦波に位置信号正弦波が重複してツインTトラップに入って来た場合の出力波形をLTSpiceで占ってみる。 ・FG信号の入力は±10mV、位置信号入力はその十倍の±100mVである。 ・先ずは、位置信号の周波数が97.5kHzと、ツインTトラップの設定周波数と同じ場合。 |
 |
| ・結果が右。 ・位置信号正弦波がFG信号に僅かに乗っているため、FG波形の正弦波が多少滲んでいるが、その程度は非常に僅かで、ここまで位置信号が減衰していれば、コンパレーターは僅かなヒステリシスの設定で正しく動作するだろう。 |
 |
| ・次に、位置信号の周波数が93.23kHzと、位置信号発振器の本来の設定周波数の場合。 |
 |
| ・これが、No-124の設計で想定したツインTトラップ経由後のFG信号の姿ということになる。 ・CもRも実際の製品には系列があるので、それを用いて周波数発振器とツインTトラップを構成する以上、上のような理想的な状況には出来ないので、この程度にはならざるを得ない。 ・したがって、No-124ではコンパレータに±2.5mVのヒステリシスを設けて、この位置信号の残滓振幅には反応しないようにしている訳だ。 |
 |
| ・が、一号機から不変の位置信号発振器は、発振精度が余り良くないのか、No-214ではその発振周波数は88kHzだそうである。 ・1%精度のSEコンを使用してもその程度の誤差が生じるということだろうか。 ・なので、位置信号の周波数が88kHzの場合。 |
 |
| ・一気に位置信号の残滓振幅が大きくなった。 ・この場合だとコンパレータのヒステリシスは±5mVは最低必要だ。 ・結局ツインTトラップについては、そのフィルター機能が非常にピンポイント的であることが、現実にはあだになりやすいという問題がある。ということである。 ・特に位置信号発振器の発振周波数。これは、設計値は93kHz程度のようだが、音楽を愛する新・新単行本下巻P102やNo-214のP119にあるとおり実際は88kHz程度の発振周波数になるようである。 ・だから、No-124でも、右のようなツインTトラップ後のFG信号になっている可能性がある。 ・で、この通りであれば、ヒステリシス設定が±2.5mVのNo-124ターンテーブル制御アンプは上手く動作しないということになる。 |
 |
| ・私のNo-124も、当初において動作が不安定だったのは、ツインTトラップ周波数と位置信号発振器の発振周波数に、実際に用いたC、Rの誤差含みも含めたかい離があって、結果として、ツインTトラップ後のFG信号に乗る残滓位置信号のレベルが±2.5mVのヒステリシスレベルぷらぷらの状態だったからであろう。 ・だから、ツインTトラップ方式では、ツインTトラップと位置信号発振器のC、Rには1%誤差等の精度の高いものを用いることは最低限の条件だ。 ・し、周波数測定器を有しているのならば、位置信号発振器のC、Rを調整し、その発振周波数を90数KHzにすることによって、ツインTトラップ周波数に合わせることにより、良い結果が得られるだろう。 ・が、この辺が説明されたこともなく、したがって、作りっぱなしで上手くいくのは偶然の幸運に恵まれた場合だけなのかもしれない。ので、上手くいかない例が多発するのも当然か。 |
| ・ということがあってか否かは知らないが、最新のNo-214では、FG信号と位置信号の分離に単純な6dB/decのCRローパスフィルタが起用された。 ・このようなもの(失礼)で良いのであれば、かつてのFGアンプもツインTトラップも何のために起用したのか。。。という気になってしまうわなぁ。(^^; |
 |
| ・その特性が右。 ・確かに100Hz前後のFG信号はそのまま通過することが分かるが、90kHz程度の位置信号の減衰量は30dBに達しないようだ。 ・大丈夫だろうか。 |
 |
| ・なので、位置信号正弦波の周波数をNo-214のとおり88kHzとして、105.5HzのFG信号正弦波に位置信号正弦波が重複してCRフィルターに入って来た場合の出力波形をLTSpiceで占う。 ・FG信号の入力は±10mV、位置信号入力はその十倍の±100mVなのは同じ。 |
 |
| ・結果が右。 ・案外良い。(爆) ・上のツインTトラップで位置信号が88kHzの場合の結果よりも良い結果である。 ・本当にかつてのFGアンプもツインTトラップも何のために起用したのか。。。という気になってしまうわなぁ。(^^; |
 |
| ・この際なので、この場合について、No-214のボルテージコンパレータ(もどき)の回路で上手く方形波に変換されるか、そしてその方形波出力が微分回路で555をトリガーするパルスに上手く変換されるか、をLTSpiceで占う。 |
 |
| ・結果が右。 ・下の緑がボルテージコンパレータの出力であり、上の赤がそれを微分した出力である。 ・ボルテージコンパレータの出力は、その立ち上がり、立下りに振動が見られるのだが、まぁ、動作に支障はなさそうだ。 ・というのは、この方形波の立下り部分を微分した上の出力パルス(赤)が、マイナス電圧の領域まで鋭く発生しているからである。この赤のパルスがトリガーとなって次のモノステーブル555がFGパルスを発生するのだが、これなら上手くいきそうだ。 ・が、微分によるパルスは方形波の立ち上がりの部分でも発生している。これは立ち上がり時に発生している振動によるもので、これがもう少し長くマイナス側まで伸びるとまずいのだが、右の通りそのピークはマイナスに側まで達っしてはいないので、このパルスではモノステーブル555はトリガーされないだろう。 ・と、LTSpiceの占いはとりあえずOKと出た。 ・が、ちょっとぎりぎりだ。 |
 |
| ・ボルテージコンパレータがマルチプルトリガーを起こした場合どうなるのかを観るために、この場合において正帰還回路の56Ωを15Ωにしてヒステリシスを±2.5mVとし、同様に占う。 |
 |
| ・なんと、ボルテージコンパレータは方形波の立ち上がりと立下りの部分でかなりの振動を起こしており、結果、方形波の立ち上がり、立下りの速度も総合的にかなり低下してしまっている。って、やはりこれがマルチプルトリガーの姿だね。 ・微分回路が鋭く深いパルスを出力するためには、方形波の立ち上がり、立下りが急峻である必要がある。ので、このような振動した方形波では方形波の立下りにおける微分パルスも連続して発生し総体として鈍く浅くなってしまっている。あわせて、方形波の立ち上がりにおける微分パルスもそれと同じような姿になってしまった。すなわち、これがマルチプルトリガーが発生しまくっている姿。 ・この微分パルスでは、555は全くトリガーされずに結果速度制御が効かないか、ひどいワウフラを起こしつつ回るかの状況になるだろう。 |
 |
| ・と、No-214のMK2用で登場したCRローパスフィルター方式も案外上手くいくようである。 ・が、それはFGからの本来のFG信号の振幅が±10mVとしてシミュレートした場合のものである。もし、個体差によってFG信号の振幅が±10mVを下回るものがあれば、この下の場合のシミュレーションのような状況に陥らないとも限らない。 |
| ・となると、やはり最終的にはFGアンプの採用以外にないのでないかと思ってしまう。 ・ので、105.5HzのFG信号正弦波に位置信号正弦波が重複してFGアンプに入って来た場合の出力波形をLTSpiceで占う。 ・FG信号の入力は±10mV、位置信号入力はその十倍の±100mVの設定なのはこれまでと同じ。 |
 |
| ・結果が右。 ・確かにFG信号は振幅±10mVから±1Vと百倍の大きさになった。 ・が、位置信号も±100mVから±300mVと3倍程度に大きくなっており、結果、FG信号と位置信号の比率的には上の6dBCRフィルターによる結果と殆ど違わない。 ・この結果では、ボルテージコンパレータのヒステリシスレベルを、時空を超えた新単行本の33kΩ+680Ωで±100mV程度としても上手くいかないだろう。 |
 |
| ・何故こうなるのか? ・は、このFGアンプのゲイン-周波数特性を観れば一目瞭然だ。 |
 |
| ・それが、右。 ・確かに100Hz程度のFG信号は40dB=100倍大きくなるのだが、90kHz程度の位置信号も10dB=3.3倍程度大きくなるのである。 ・要するにこのFGアンプを使用しても、FG信号と位置信号のレベル差は30dB弱しか広げられないのである。で、これは上のCRによる6dB/decハイカットフィルタ方式と全く変わらない。 ・のは、FGアンプでハイカットのために採用している帰還回路のフィルターもCRによる6dB/decのフィルタなのだから、当たり前なのだ。(爆) ・さらに言うと、両者で得られるFG信号と位置信号の分離能力=-30dB弱は、ツインTトラップで実用的に得られる分離能力とも同じ程度だ。 ・だから、ツインTトラップ方式やCRフィルタ方式で場合によってコンパレータのマルチプルトリガーが起こるのであれば、この場合も、33kΩ+680Ωで±100mV程度のヒステリシスに設定したコンパレータはマルチプルトリガーを発生して上手くいかないだろう、ということになる。 ・ありゃ(^^; |
 |
| ・が、時空を超えた新単行本のMK2用ターンテーブル制御アンプは、実はこれが上手くいくための方策をもう一つ採用しているのである。 ・それは、上巻P175にある。 ・「FGコイルを1kΩという低い抵抗で受け、FGコイルに誘導する高周波分を抑える」ことだ。 ・この高周波分とは勿論位置信号の飛びつき信号である。 ・要はFGコイルへの位置信号の誘導なので、回路インピーダンスを下げれば誘導起電力は下がり、位置信号の電圧レベルは小さくなるということである。この対策を併用することによってMK2用のFGアンプ方式は成功しているということなのだ。 ・と、この部分重要な事項なのだが、ご本人もお忘れなのか、音楽を愛する新・新単行本では下巻P218のとおり、FGコイル出力は1kΩではなくよりによって510kΩで受け、さらに、FGアンプ帰還回路のCRフィルターの定数も51kΩ+510pFと90kHz程度の位置信号の減衰量を更に減らす設定となっているだけでなく、ボルテージコンパレータのヒステリシスの設定も±50mVと狭めてしまっている。と、三重苦である。だから、音楽を愛する新・新単行本のMK2用ターンテーブル制御アンプではMK2は回らないだろう。 ・逆に言えば、MK2のFGアンプ方式が「FGコイルを1kΩという低い抵抗で受け、FGコイルに誘導する高周波分を抑える」手法を併用しなければ成功しないものだとしたら、FGアンプ方式単独の方法と同程度の分離能力=-30dB弱となるCRフィルタ方式もツインTトラップ方式も、単独では上手く行かない可能性が高い。という結論になってくる。 ・全く難儀だね。設計ミス? ・なので、オリジナルで上手く行った場合はそれで良いのだが、どうしても上手く行かないという場合には、FG信号から位置信号の分離のために、自ら工夫を凝らさなければならない。ということになる。 |
| ・その手法は人それぞれで良いのだが、最も良さ気なのはNo-214で登場したCRフィルタとFGアンプの併用方式だろうか。 ・それが右。 ・FGアンプ本体にLH0032の回路を使用しているが、ここはLF356のようなオペアンプでも、いにしえのGOAタイプでも、完全対称型でも、好きなものを用いれば良い。 |
 |
| ・LTSpiceの占うその出力波形が右。 ・一目瞭然に素晴らしい結果である。 ・これであればコンパレータのヒステリシスを33kΩ+330Ωと±50mVに設定することにより、非常に良好な動作が得られるだろう。 |
 |
| ・CRフィルタとツインTトラップの併用でも良いかもしれない。 |
 |
| ・LTSpiceの占うその出力波形が右。 ・一目瞭然にこれも素晴らしい結果である。 ・これであればコンパレータのヒステリシスを33kΩ+15Ωと±2.5mVに設定することにより、良好な動作が得られるだろう。 ・ただ、信号レベルが上の1/100、かつコンパレータのヒステリシスが±2.5mVなので、上のCRフィルタ+FGアンプ方式よりは、他のもろもろのノイズに弱い可能性はあるかもしれない。 |
 |
(2012年2月4日)
(FG信号をもうちょっとStudyする)
| ・上で、MK2用No-214ターンテーブル制御アンプのFGで上手くいかない場合の対応策として最も良さ気なのは、CRフィルタとFGアンプの併用方式だ。と言ってしまったので、本当にそうかどうかをLTSpiceで占う。 ・それが右。 ・ボルテージコンパレータは、No-214のMK2用のボルテージコンパレータ(もどき)の回路である。 ・果たして上手くボルテージコンパレータが方形波を出力し、積分回路が上手くマイナスの鋭いトリガーパルス(微分パルス)を出力するか。 |
 |
| ・結果がこう。 ・何故かコンパレータの出力する方形波の上側に変な耳が出来たような波形になっているが、問題の立ち上がり、立ち下がりは非常に急峻であり、結果、微分回路が生み出すトリガーパルス(微分パルス)も理想的である。 ・これなら、何の問題もなくSP-10MK2モーターは快調に回るだろう。 ・めでたし。めでたし。(^^) |
 |
| ・次に、CRフィルタとツインTトラップを併用した場合でも、コンパレータのヒステリシスを33kΩ+15Ωと±2.5mVに設定することにより、良好な動作が得られるだろう。と言ってしまったので、この場合についても本当にそうかどうかをLTSpiceで占う。 ・ボルテージコンパレータは、同じくNo-214のMK2用のボルテージコンパレータ(もどき)の回路である。 ・この場合はヒステリシスレベルが±2.5mVなので、コンパレータはその分高感度動作が要求される。 ・果たしてこのボルテージコンパレータは上手く方形波を出力し、積分回路が上手くマイナスの鋭いトリガーパルス(微分パルス)を出力するか。 |
 |
| ・ありゃ。駄目ですな。(^^; ・この場合駄目なのは、マルチプルトリガーが発生しているということではなく、コンパレータが出力する方形波の立ち上がり、立ち下がりのスピードが遅く、鈍ってしまっているからだ。 ・結果、微分回路は鋭く深い負のトリガーパルス(微分パルス)が作れない状況になっている。 ・で、右のような状態では、SP-10Mkモーターは制御されずに高速で回転してしまう。 ・コンパレータのオープンゲインが足りないのかな。 |
 |
| ・本当にそうかどうかを確かめるため、もっとゲインが小さいと思われるNo-214のMK1用のボルテージコンパレータ(もどき)でこれをやってみる。 |
 |
| ・ありゃ。 ・無残にも、コンパレータの出力が方形波ではなく正弦波になってしまった。 ・やはり、コンパレータとしての十分なゲインがなく、これらの場合にはコンパレータになれていないのだ。 ・「ディスクリート化することで制御アンプの目的に適したゲインと速度のVCになり、マルチプルトリガーを起こさず、安定でシャープな方形波出力が得られるようになった。」ということなのだが、その結果、No-214のディスクリートコンパレータは、No-124のMK2用のような±2.5mVのヒステリシスでの高感度動作は不可能になったようだ。 |
 |
| ・え~。 ・じゃぁ、MK1用のコンパレータは、No-214のMK1用のヒステリシス設定が±50mVの場合は上手くいくの?という懸念を抱いてしまう。 ・ので、その設定ではどうかを観る。 |
 |
| ・ヒステリシスレベルが20倍になって、上手くいくようだ。 ・めでたし。めでたし。(^^) |
 |
| ・さて、またMK2用のヒステリシス設定±2.5mVの場合に戻って、ここにもっと感度の高そうなICコンパレータを起用してみたらどうかを観る。 ・No-214のMK2用ボルテージコンパレータの回路に代えて、LT1015というものにしてみる。出来ればLM319のモデルにしたかったのだが、ないので、モデルのあるLT1015にしたもの。 ・結果やいかに。 |
 |
| ・汎用とは言え流石に応答時間10nSの高速コンパレータ。 ・ヒステリシスレベルが±2.5mVという高感度動作でも何の問題もなく、綺麗で急峻な方形波を出力する。 ・その結果、微分回路も理想的なトリガーパルス(微分パルス)を発生している。 ・やはり、No-214のMK2用ディスクリートコンパレータはゲイン不足で±2.5mVのヒステリシスでの高感度動作は出来ないのだね。 |
 |
| ・ついでに、CRフィルタとFGアンプの併用方式のコンパレータとしてLT1016を使った場合はどうかを観る。 |
 |
| ・何の問題もない、理想的な姿だ。 |
 |
| ・次に、FG信号がターンテーブル制御アンプ内でどのように変化していくのかを、もう少し先まで観る。 ・回路は下のとおり。 ・左から(1)MK2モーターが伝えてくる本来のFG信号としてピークtoピーク±10mVの105.5Hz正弦波とこれに混じってやって来るピークtoピーク±100mVで88kHzの正弦波位置信号の二つに擬した発信装置、そして(2)CRローパスフィルタにツインTトラップ、(3)コンパレーター、(4)微分回路、(5)モノステープルマルチ555、そして(6)その出力の積分回路である。 ・FG信号を105.5Hzとしているので、33&1/3回転で回っている時の状態ということになる。 ・各ポイント毎にプローブ(VF1~VF6)を取り付けて、順に信号がどのように変化していくかを観るのである。 ・なお、ここから占い師はTINA-TIである。 |
|
 |
|
| ・で、TINA-TIの占う各部の波形が下のとおり。 ・上から順に、(VF1)位置信号の混じったFG信号波形、(VF2)位置信号をフィルターで除去した後のFG信号波形、(VF3)コンパレータの出力波形、(VF4)それを微分回路で微分した波形、すなわち微分パルス、(VF5)その微分パルスによりトリガーされて555が発生する出力波形、すなわちFGパルス、そして(VF6)そのFGパルスを積分した三角波状の波形である。 ・VF1の位置信号の混じったFG信号波形には、必要なFG信号(105.5Hz)に、その十倍の不要な位置信号(88kHz)が混じって、この時間軸設定では帯状に見える信号になってしまっている。が、CRローパスフィルターとツインTトラップの2段重ねでその位置信号を減衰させることにより、VF2のように位置信号が綺麗に取り出せている。その振幅波形にはまだ88kHzの位置信号が多少残って重複しているが、この程度ならボルテージコンパレータに数mVのヒステリシス(不感帯)を設けることにより対処可能だ。 ・そこで、コンパレータにNo-124の設定と同様の33kΩ+15Ωで±2.5mVのヒステリシスを設定すると、VF3がその出力波形だ。VF2のFG信号が0Vをクロスするタイミングでコンパレータは+5Vと-5Vを往復する方形波を出力する。要するに、ここでFG信号からその周波数=モーターの回転速度情報を取り出した訳である。 ・で、それ以降はこの速度情報をそれに比例する電圧情報に変換するためのプロセスになる。 |
|
 |
|
| ・まず、コンパレータの出力する方形波の立ち下がり信号から、コンデンサー+ダイオードの微分回路で鋭い負パルス(微分パルス)を形成する。それがVF4。ここで、コンパレータの発生する方形波が鈍っていると上手くないのは上で観たとおりであるが、実はここに使用するダイオードも逆回復時間(Transition
Time)の短い高速なダイオードでないと上手くない。ディスコンの指定品1S1588は4nSと優秀なものであるので、代品を使う場合はそれに見合う高速なダイオードを起用しないといけない。ので、このシミュレーションでは、どこのものか知らないがBAS55というTransition
Time=2.5nSのダイオードを起用している。 ・そのVF4の負パルス(微分パルス)にトリガーされて、モノステープルマルチ555がVF5のFGパルスを出力する。即ち、微分パルスの周期に同期するので、その周期TはFG信号の周波数そのものになる。一方、そのFGパルスが5Vのハイレベルになる時間THはその6番ピン(スレッシュホルド)と7番ピン(放電)に接続された抵抗(R10)とコンデンサー(C6)によって決まる一定の時間になる。 ・そこで、このFGパルス(VF5)をR11とC7の積分回路で積分すると、FG信号から抽出した速度情報が、VF6の三角波の電圧値に変換されて出力されるのだが、その電圧値は、FG信号の周波数=モーターの回転速度に比例する値となる訳だ。 ・だから、後はこの三角波のピーク値をサンプル&ホールドで取り出して、それによってモータードライブアンプのゲインをコントロールすれば、速度制御は上手くいく。という訳である。 ・なので、その三角波のピークが本当にFG信号の周波数=モーターの回転速度に比例するものとなるかどうかを占う。 ・まず、モーターの回転速度が速くなった場合として、FG信号の周波数を125.5Hzとした場合。 |
|
 |
|
| ・VF2以下、全ての周波数が125.5Hzとなったことが分かるし、結果VF6の三角波の電位が全体として上がり、そのピークが上の場合の1.5V程度から2.0V程度に上がったことが分かる。 ・次に、モーターの回転速度が遅くなった場合として、FG信号の周波数を85.5Hzに下げた場合。 |
|
 |
|
| ・VF2以下、全ての周波数が85.5Hzとなり、結果VF6の三角波の電位が全体として下がり、そのピークも1.0V程度に下がったことが分かる。 ・と、この回路で速度制御は上手くいくというTINA-TIの占い結果だ。 ・めでたし、めでたし。(^^) |
|
| 次に、私のNo-124のMK2用制御アンプは、稼働当初において、オリジナル通りのツインTトラップのみの位置信号除去回路だった際に、上手く制御できないというトラブルがあったので、その辺何故だったのかをTINA-TIに占ってもらおう。 ・その回路はこう。 |
|
 |
|
| ・結果。 ・コンパレータの出力する方形波(VF3)にマルチプルトリガーが見られ、その微分パルス(VF4)もあまり適切に発生しているとは思えない状況だが、結果としてはFGパルス(VF5)が正しく発生し、三角波(VF6)も適切で、上手く行くという占い結果だわなぁ。(^^; |
|
 |
|
| ・が、実は最新のNo-214には前回のNo-203で何気に変更された微分回路が使われており、上のシミュレーションでもその微分回路を使用しているのだが、それではそれ以前の微分回路を使用している実機とは異なってしまう。ので、実機と同様の以前の微分回路に変更して、再度シミュレートする。 ・回路は下の通り。微分回路だけが微妙に異なる。 |
|
 |
|
| ・結果はこう。 |
|
 |
|
| ・微分回路のちょっとした変更で微分パルス(VF4)の姿が変わり、この結果、555が正しくFGパルスを出力しなくなった。これでは速度制御は不能だ。 ・すなわち、コンパレータの出力する方形波(VF3)の立ち下がりの際に発生する微分パルス(VF4)の負電圧方向への伸びが減り、その結果モノステープルマルチ555をトリガーできなくなったのだ。 ・私のNo-124MK2用制御アンプも、稼働当初においてはこのような状況に陥り、制御が上手くいかないという状況になったのだろう。 ・No-203から、微分回路が何気に説明もなく改良されていたんですなぁ。(爆) ・微分回路がそういう状況であることを知るよしもない当時、私は不具合発生の要因がFG信号に混じる位置信号等を十分に減衰させていないためだと考え、それをもっと減衰させるために、下のように位置信号出力にパラにコンデンサー6500pFを繋いだのであるが、結果、不具合は解消したのだった。 ・ので、これを占う。 |
|
 |
|
| ・結果、やはり大分良くなる。 ・が、FGパルス(VF5)が途中で途切れてしまっており、まだ十分ではない。とは言え、コンパレータの出力する方形波(VF3)やその微分パルス(VF4)はよほど綺麗なものとなっている。にもかかわらずFGパルス(VF5)が途中で途切れてしまう原因は、ひとえに微分パルス(VF4)の負電圧方向への伸びが不足しているからだということが明らかだ。 ・したがって、微分回路を新型に変更すれば上手くいくだろうことが容易に想定できる。 |
|
 |
|
| ・FGの出力にコンデンサーをパラに繋げば効果があるはずと判断したのは、FG信号がFG“コイル”から出力されるからである。即ち、FGコイルのインダクタンスとコンデンサーでLCローパスフィルターになるはずと期待したもの。FGコイルのインダクタンスがどれだけあるかは分かるはずもないので、現物合わせの場当たり的対策ではあるが、結果的には手持ちの3300pFから10000pFのCをパラにすると、私のNo-124MK2用制御アンプの不具合は解消したのであった。 ・ので、下のようにFGコイルのインダクタンス分をL1としてシミュレートしてみた。 ・結果、そのインダクタンスはこの場合最低1.5mHあれば上手く行くようだ。 |
|
 |
|
| ・このとおり。 ・だから、SP-10Mk2モーターのFGコイルは1.5mH以上のインダクタンスなのかもしれない。 |
|
 |
|
| ・さて、最後にそのCRフィルター1段のみのNo-214のMK2用回路が上手くいくかどうか、TINA-TIで占う。 |
|
 |
|
| ・結果が下。 ・なんと、全く駄目。という結果だ。(^^; ・LTSpiceの占いでは、ボルテージコンパレータは方形波を出力したのだが、TINA-TIの占いではボルテージコンパレータがそもそも方形波を出力しないという結果になってしまった。 ・本当? |
|
 |
|
| ・これでは困るので(^^;、FG信号に混じってくる位置信号のレベルは±100mVにしたまま、本来のFG信号のレベルを±10mVから±15mVに上げてシミュレートする。 ・と、結果がこのとおり。 ・完璧な動作になったではないか。(爆) |
|
 |
|
| ・SP-10MK2用制御アンプについては、FGコイルが発電するFG信号、そしてこれに誘導で混じってくる位置信号のそれぞれのレベルが、モーターの個体差や回路配線実装等の要因によって微妙に変化し、その結果モーターが回る場合と回らない場合が出てくるのではないか。ということを示唆する結果である。 ・私のNo-124の場合も含め、WEB上でもMK2用制御アンプの製作で、このFG信号の部分でのトラブルの事例が多く報告されていることからすると、それは事実なのではなかろうか。 ・とすれば、SP-10MK2モーター用の制御アンプについては、モーターの個体差や回路配線実装等の要因で偶然上手くいったり、上手くいかなかったりする、ぎりぎりの設計なのだと言わざるを得ないことになる。モーターの個体差によるFG信号の大きさはどうにもならないし、その出力が小さいのに当たったからといって容易に別の個体を入手するという訳にもなかなかいかないのだから、なんとも難儀だ。 ・一生に一つ作るか作らないかのターンテーブル制御アンプは、製作の難度も高い。のに、せっかく苦労して組んだターンテーブル制御アンプが、こんなところで偶然に左右されて上手く回らないということになるのでは、あんまりだ。 ・はっきり言えば設計ミス。と言わざるを得ないのだが、商品ではないので文句は言えない。 ・のだが、このFG部分がMK2用のターンテーブル制御アンプの製作挫折の原因になっているとしたら全く残念なことだ。 |
|
| ・よって、結論。 ・SP-10MK2用のターンテーブル制御アンプについては、FG信号からこれに混じる位置信号を十分に除去するため、ローパスフィルター(CR型、LC型)、ツインTトラップ、またはFGアンプを単独で搭載するのではなく、それらのうちのいずれかふたつを併用するのが吉。 ・その一つにFGアンプを使えば、FG信号のレベルが大きくなり、コンパレータのヒステリシスレベルを±50mVや±100mVに設定することが出来ることから、他のもろもろのノイズにも強くなるので、それが一番吉だろう。 ・例えば下の回路。ローパスフィルター(CR型)にFGアンプの併用型。 |
|
 |
|
| ・下の通り、綺麗に問題なく動作するというTINA-TIの占い結果だ。 ・が、FGアンプに旧GOAタイプなどを使ってオフセットを自分で調整できる場合やオフセットの調整できるオペアンプを起用する場合は良いのだが、オフセットの調整できないオペアンプを起用する場合はオフセットの小さいものを選ぶことが必要である。 ・この場合も、FGアンプの出力(VF2)に200mV程度のオフセットが出ており、このため、これまでのものと異なり、ボルテージコンパレータ以降の最初の1波が出ていない。下手をするとそのオフセットが原因で上手く動作しない場合も考えられるからだ。と、この点だけが留意事項。 |
|
 |
|
| ・で、最後に念のため。 ・以上はLTSpiceとTINA-TIによる占いに過ぎない。 ・ので、むやみに信じてはいけない。(爆) |
|
(2012年2月9日)
(FG信号を最終的にStudyする)
| ・シミュレーターはなかなかに役立つ。 ・が、所詮はシミュレーターに過ぎないから、当たるも八卦当たらぬも八卦。信じてはいけない。 ・というか、条件設定やモデリング、計算式の正しらしさ等で現実と乖離が生じるのは当然なのだ。 ・よって、押し入れの奥で眠っていたSP-10MK2のモーターユニットを取り出してきた。 ・これにプラッターを取り付け、手回ししながら、FGコイルが発電するFG信号の姿を最終的にStudyするのである。 ・制御アンプも何もつながない状態であるから、ピュアなFG信号が見られるはずである。 |
 |
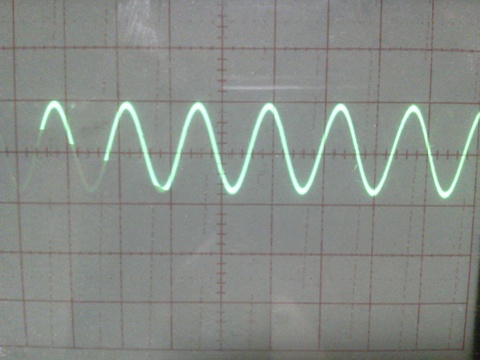
| ・と、思ったのだが、何と右のようなとてもピュアとは思えない波形が出てきたのだった。(爆) ・オシロの設定は横の時間軸が5mS/div、縦の振幅軸が20mV/divである。これは以下の写真も同じ。 ・写真の右の方で波影が消えているが、それはカメラのシャッター速度とオシロのブラウン管の走査時間の関係でカメラにはたまたま写らなかったもので、目で見る分には波形はちゃんと画面全体にある。これも以下の写真で同じ。 ・この場合、このもやもやしたものは勿論位置信号が誘導して飛び移ったものではない。モーターは何にも繋がっていないのだ。ただ手回しして慣性で回っているだけである。 ・また、これもカメラのシャッター速度とオシロのブラウン管の走査時間の関係で写真には良く写っていないのだと思うが、目で見ると、このぼやけた波形だけでなく、画面全体に薄いもやがかかったような感じで、もっと振幅の大きいパルス状の波形が見えることもあり、画面全体に背景ノイズのようなものがある感じなのである。 |
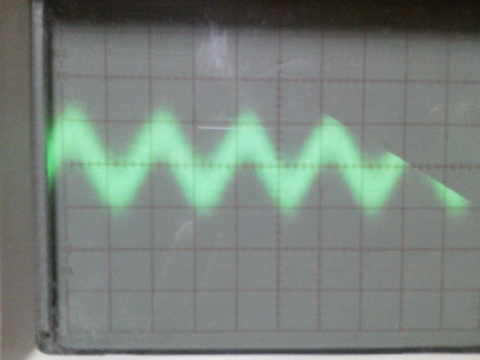 |
| ・そのもやもやと、背景ノイズのようなものの正体が最初分からず、とりあえずこのFG信号の出力に12kΩ+5500pFのCRローパスフィルターを取り付けてみた。 ・ら、そのローパス後のFG信号が右。 ・なんと、もやもやも背景ノイズのようなものも消え失せて、FGコイルが発電するFG信号が綺麗に現れた。 ・シャッターのタイミングが良く、手回しであるから回転速度が一定しないところ、上手く33&1/3回転時の周期に近い周期10数mSのところが写った。これで、FG信号はモーターが33&1/3回転ではピーク±10mV程度の振幅となることが分かる。この振幅は私の現在稼働中の別のSP-10MK2モーターユニットと同じだ。 ・で、ここまできてようやくピン!と来た。 ・上でFG信号にまとわりついているもやもやと、画面全体に感じる背景ノイズのようなものの正体は、空中からやって来る様々な誘導ノイズではないだろうか。と。 ・インバーター機器やスイッチング電源からのノイズなど様々な電磁ノイズが電灯線等を経由してやってきて、FGコイルに誘導しているのだ。 |
 |
| ・その誘導の姿は、モーターを停止させた状態で、FGコイルの出力にただオシロのプローブを繋ぐと右のように姿を現す。 ・もやもやとしたランダムなノイズである。 |
 |
| ・これが、空間からやって来る誘導ノイズであることは、モーターを停止させた状態で、同じようにFGコイルの出力にただオシロのプローブを繋いで出てきた右の姿で間違いないことが分かる。 ・上との条件の違いは何か? ・それは、オシロのプローブのアース側とモーターユニット外側の金属部をワニ口クリップ線で繋いだことである。 ・これでモーターユニットがアースされ、結果内部のFGコイルがシールドされて、外部空間からやって来るもろもろのノイズがFGコイルに誘起されなくなったのだ。正確にはその誘起量が劇的に減少したのだ。 |
 |
| ・さらに、その証拠となるものが右。 ・これは、モーターユニットをそのようにアースし、ローパスフィルターを取り付けていない状態でのFG信号である。 ・モーターユニットをそのようにアースさえすれば、ローパスフィルターを取り付けなくとも右のようにFGコイルから綺麗なFG信号が取り出せるのある。 ・なんとまぁ。。。 ・これまで私はSP-10MK2モーターのFG信号の問題については、強大な位置信号がFGコイルに誘導して混じってくる問題しか考えていなかった。 ・今回、ようやく、空中からやって来る様々なノイズのFGコイルへの誘導の問題もあることが分かった。 ・この空中からやって来る様々な誘導ノイズは様々な周波数成分を有しているから、私のNo-124のMK2用制御アンプにおいても、稼働当初、ツインTトラップだけでは除去周波数範囲が狭すぎて全てを減衰させることが出来ずに不具合を生じさせたのだ。 |
 |
| ・右は、FGコイル出力に単純に5500pFをパラに繋いだだけの場合のFG信号の姿である。 ・モーターユニットの外側をアースすることはしていない。それでも、このような綺麗なFG信号が取り出せる。 ・上で、私のNo-124のMK2用制御アンプにおいて、FGコイル出力に6500pFをパラに繋いで不具合が解消したのは、FGコイルと6500pFでLCローパスフィルターとなって位置信号をさらに減衰させたものだと書いたのだが、それは必ずしも正確ではなかったことがこれで分かる。 ・6500pFをFGコイルにパラに繋ぐことにより、回路の高域のインピーダンスが下がり、空中からやって来る様々な誘導ノイズのFGコイルへの誘起電圧が大幅に減少したというのが本当の理由だったのかもしれない。近くに放送局の電波塔がある場合などは格別だが、空間の誘導ノイズだから起電力自体は微少なのでこれは当たり前だわなぁ。 ・結果、モーターユニットをアースしたのと同様の効果が生じて私のNo-124のMK2用制御アンプは不具合が解消したのだ。 ・なんとまぁ。。。 ・SP-10MK2用ターンテーブル制御アンプについては、モーターユニットのアースを取る設計にさえなっていれば、FG信号でマルチプルトリガーが発生してモーターが上手く回らない等のトラブルの発生は、もっと減っていただろう。 |
 |
| ・すなわち、MK2用ターンテーブル制御アンプでマルチプルトリガーを起こすことが多かったのは、高速・高感度のLM319のせいではなく、FGコイルへ誘導した位置信号の除去対策及びFGコイルへの空間ノイズの誘導防止又はその誘導ノイズの除去対策が不十分だったからである。 ・よって、結論。 ・SP-10MK2用ターンテーブル制御アンプについては、FG信号の最初の部分で5000pFから10000pF程度のコンデンサーをパラに繋ぐか、10kΩ+5100pFなどのローパスフィルターを挿入して、FG信号にまつわりついてくる空中からの誘導ノイズを除去することが吉。 ・勿論、モーターユニットのところでFG(-)(すなわち制御アンプのアース側)をモーターユニットの金属部分に繋いでモーターユニットをアースすることも効果的だが、FG信号の最初の部分で5000pFから10000pF程度のコンデンサーをパラに繋げばそれと同様の効果が得られることが上の写真から明らかだから、既に作ってあるターンテーブルからモーターユニットを取り出してアースを取ることを敢えてするまではない。 ・また、前回の結論の「ローパスフィルター(CR型、LC型)、ツインTトラップ、FGアンプを単独ではなく、ふたつ併用することが成功への近道」については、その場合まずローパスフィルター(CR型、LC型(この場合LC型とは単純にFG信号経路にCをパラにすることである))をFG信号側に、次にツインTトラップまたはFGアンプの順に配置するのが吉。と補足する。 ・なお、以上は、空中や電灯線等からのノイズの誘導などがない、クリーンルームや電波暗室のような電磁環境の良い、羨ましいリスニングルームをお持ちの方については、この限りにあらず。(爆) |